沒想到啊沒想到,看似常規的自動駕駛技術分享,竟然意外曝出行業內幕???“今年開始,有一些自動駕駛駕駛供應商用傳統CNN包裝所謂“無圖方案”忽悠車企。”“很多AEB“五星”測試結果,實際是在用場景識別的方式作弊!”“一些本來被認為做得還不錯的玩傢,向車企兜售劣質方案,拿用戶性命開玩笑!”
這可能是今年最直白,最激烈自動駕駛前沿現場。
智駕科技的創始人、CEO周聖硯,毫不客氣地揭“老底”。
所以問題來,智駕科技為什麼這麼剛?它說的都是真的嗎?
以及,指出問題外,智駕科技有沒有解決問題的方法?
揭哪些底?
主要的問題有兩個,都是針對今年自動駕駛大熱的趨勢或議題。
首先,是去高精地圖依賴。意思是高階智駕功能,尤其是拓展到城市道路的領航輔助,今年正走向輕高精地圖化,甚至是去高精地圖的技術路線。
原因也很簡單,一是道路基建更新快,高精地圖的采集更新不及時;二是高精地圖本身的制作,需要投入巨大的成本;第三點,高精地圖信息的采集、制作、使用等等環節,法規準入愈發嚴格。
但智能駕駛的量產競速不等人,所以輕圖或無圖就成幾乎所有量產玩傢追求的方案,也成主機廠卷成本的必然選項。
不過智駕科技CEO周聖硯卻說,今年年初這個思路剛流行起來時,就發現行業某些玩傢,拿傳統的CNN,包裝“無圖方案”。
準確的說,是在主機廠客戶看不到的底層算法上,使用成熟但能力不足的CNN,替代BEV,通過調參等手段做一個十分漂亮的Demo。
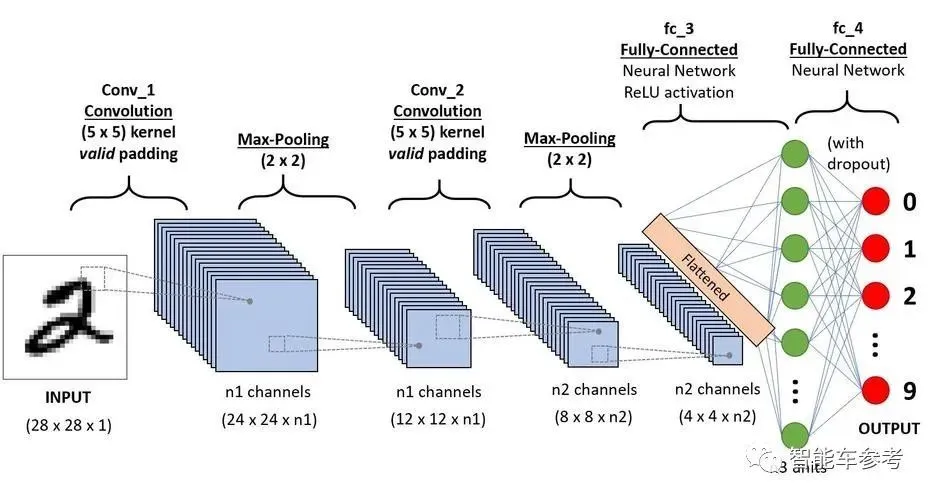
CNN就是卷積神經網絡的簡稱,也是傳統圖像特征識別、提取的手段。但其局限性在於對目標的識別基於單幀數據,沒有時序特征,也難以建立起不同目標之間的關系特征。
舉個例子,“無圖”情況下需要系統實時感知生成道路拓撲結構,CNN隻能通過岔路口始終不變的“點”來識別。
但如果有目標經過這個“點”,造成短暫的遮擋,CNN就會瞬間失去對道路范圍、車道線的正確識別,造成變道失敗、緊急退出等等情況。
緊急情況下,隱藏著巨大的安全隱患。
第二點,是最近頻頻吵上熱搜的AEB功能。智駕科技曝一個更猛卻令人哭笑不得的內幕:
實際上一些所謂C-NCAP五星級AEB功能,都在使用“場景識別”作弊。
啥是場景識別?就是通過特殊的場景觸發特定機制。

因為無論是C-NCAP或是任何-NCAP的標準AEB測試中,假人目標永遠是黑上衣藍褲子,一旦系統識別到黑上衣藍褲子人形目標,立刻提高AEB系統靈敏度,多快速度都能剎住。
但這樣的系統是無法正常使用的,誤觸發太多。所以用戶正常使用中,所謂“五星”AEB,根本沒有任何作用。
簡單到令人瞠目結舌。
智駕科技認為,現在行業出現這種低成本“劣幣驅逐良幣”的隱患。
而真正有積累且負責任的自動駕駛公司,會用技術解決問題。
搞什麼新動作?
智駕科技首先科普區別真無圖和假無圖方案的最直觀方法,就是看系統有沒有實時感知生成的道路拓撲結果:
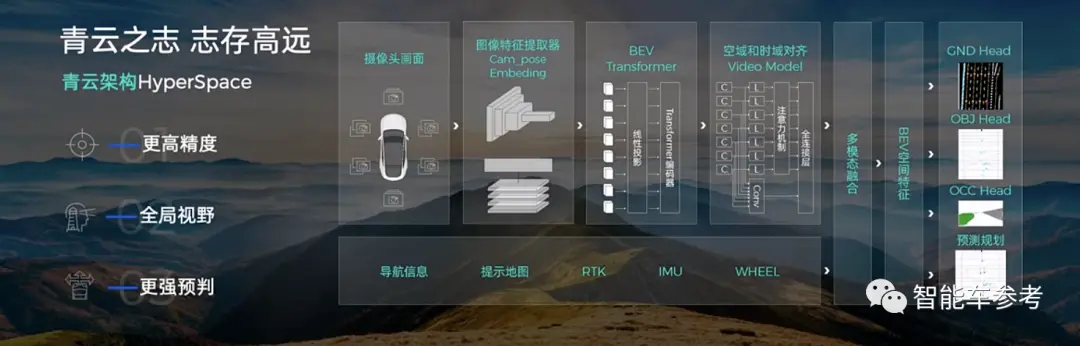
支撐這項能力的,是以Transformer架構為基礎的BEV算法。
BEV是將傳統自動駕駛2D圖像的感知方式,轉換為在鳥瞰圖視角下的3D感知。BEV空間經過處理,是可被算法理解和應用的。
在BEV框架下,所有後續的感知、預測、規劃都可以在同一個空間進行,減少上層對不同空間結果進行判斷決策的麻煩。
再進一步,BEV將不同傳感器輸入在同一空間進行統一,一些事情就更容易。比如對物體的深度、體積、位置處理。
另外,BEV不僅有更豐富準確3D信息, 4D信息的提供也更容易——即時序融合。
由於BEV將各傳感器數據都拉到統一空間,並統一形式,就更容易得到不同源的信息或特征,更容易知道不同目標在時間先後以及空間相對關系。
再再進一步,時間和空間做到更好的統一,那麼很多傳統感知的短板也能彌補。
首先是對於運動物體的估計會更準確,預測算法也會更穩定、高效;另外因為BEV算法是基於學習而來,那麼對於遮擋場景以及物體狀態可以做出推理,腦補出完整形態等等。
周聖硯認為,BEV給自動駕駛一把新的鑰匙,實現自動駕駛端到端的重新定義。
智駕科技從2020年開始,做的最重要的一件事,就是用BEV+Transformer重構自己的全部技術體系,成果是青雲Hyperspace架構。
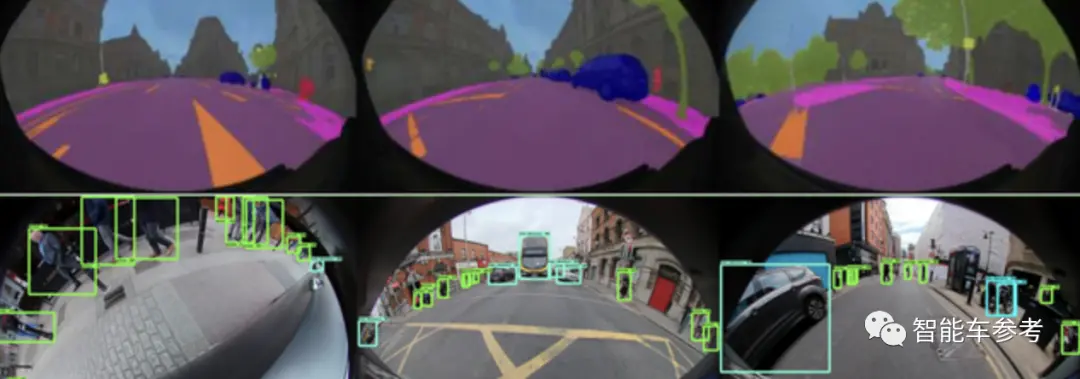
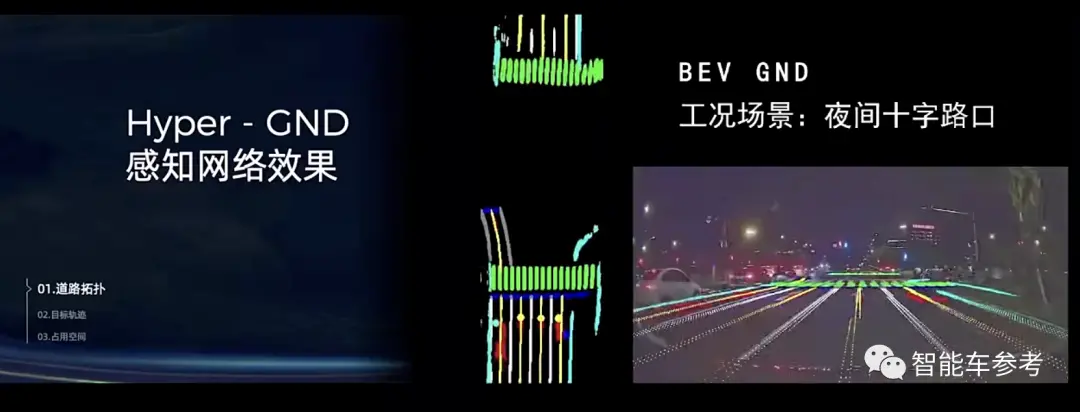
融合道路拓撲、目標軌跡、占用空間三大網絡。
傳統的L2系統,或基於高精度地圖的智駕,道路拓撲的關系不需要車端感知完成,但在無圖情況下,道路拓撲的關系檢測就交給BEV。
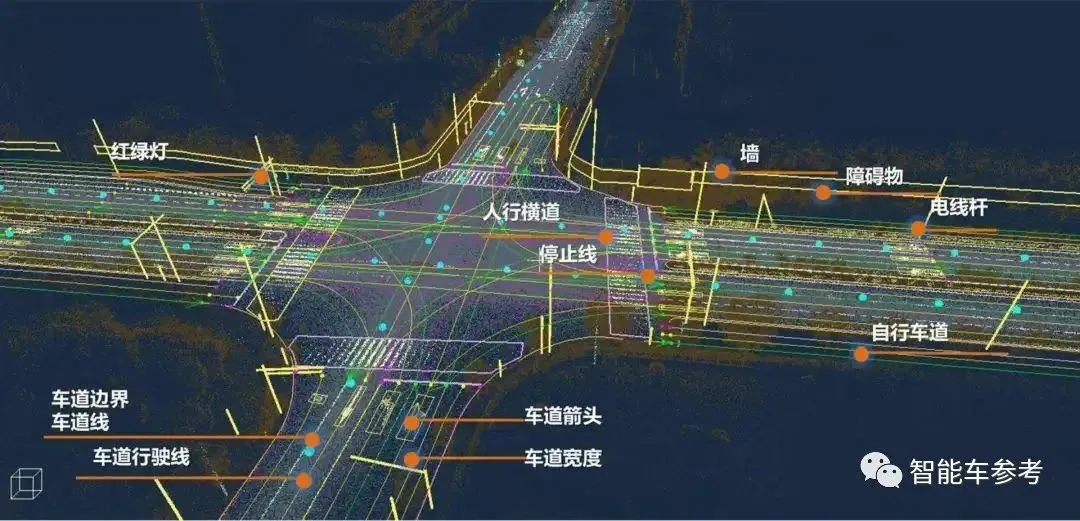
青雲BEV架構的感知系統,精度上可以達到橫向5公分,縱向1/1000的精度。千分之一就相當於在100米發現一個道路的分叉點,而這個關於分叉點的誤差不會超過10公分。
其次,青雲BEV架構能輸出車道線、地面箭頭、斑馬線、停止線等等目標,多達100多種交通要素屬性,這些要素足夠做無圖 NOA 的需求。
第三,青雲BEV具備超視距的能力,在6V(攝像頭) 的基礎上,向後可以最遠看到100米,向前可以看到150米,且精度不打折扣。
最後,由於添加時序信息,青雲BEV目標遮擋,能夠自行“腦補”,還原整個道路拓撲的完整性。
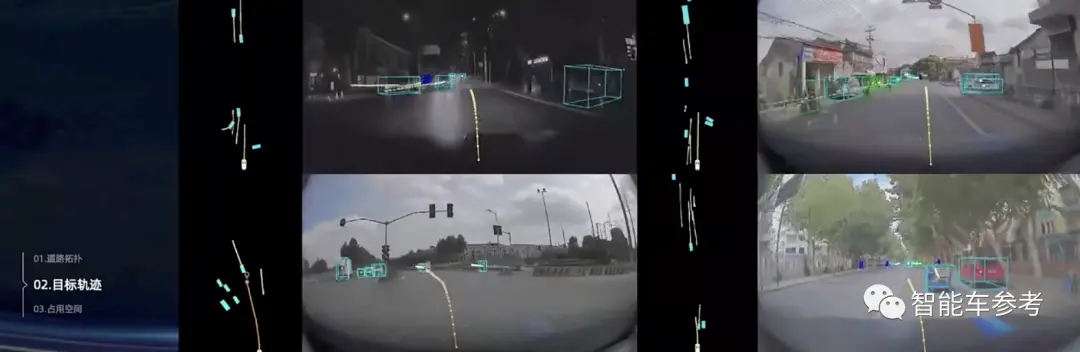
目標軌跡網絡,是青雲 BEV 架構的第二個模塊。在傳統的CNN網絡下下,目標檢測僅僅停留在歷史和當下的單個目標的軌跡,對未來的軌跡,隻能用基於規則的卡爾曼濾波的方式進行線性預測,往往是不準的。
青雲 BEV 則利用生成式的方式解決目標軌跡的預測問題。可以準確的預測目標 3 秒後的軌跡。相當於AI司機也具備防禦性駕駛能力。
青雲 BEV 架構的第三個亮點,也是行業目前最期待的一個技術點=創新,就是純視覺占用空間。

直觀的說,就是將車輛周圍的世界用 10 公分的立方體組成網格,像搭樂高積木一樣把它搭出來。除能部分替代激光雷達的的作用,降低成本。
更重要的是系統不區分車輛、行人等不同目標,直接網格化表達,當系統發現前面有一個障礙物,不用經過感知識別等一系列決策鏈條,系統直接進行進行自動剎車。
通過智駕科技的青雲架構也能看出,BEV+Transformer帶來的不僅僅是技術創新,而是顛覆傳統CNN算法模塊化累加造成的不確定性,可以理解為一種絕對意義上的底層技術創新重構。

智駕科技也基於此提出一種很新的城市NOA實現方法——記憶共享:青雲BEV架構利用拓撲元素,加之組合導航算法,可支持一次性完成自動化建圖記憶,這是記憶共享技術實現的基礎。
然後,通過MAXIPILOT®全系智能駕駛產品的投放市場,實現不同級別價位車型覆蓋,這意味著入門級配置即可支持城區建圖,能夠幫助車廠客戶以80%的規模化量產方案為基礎,構建20%高配方案所需要的核心場景數據。
這套MAXIPILOT®全系智能駕駛產品的邏輯,就是基於這樣的思路誕生。
MAXIPILOT®2.0 Lite主打城市增強L2方案,依托青雲BEV技術解決當下L2體驗不連續的產品痛點,例如L2系統在路口場景容易退出/道路拓撲變化體驗不佳等。

包含BEV一體機和MDU20域控兩種產品形態,覆蓋20萬元以下車型細分市場實現智慧化升級,支持極高性價比的輕地圖高速NOM(Navigate on MAXIPILOT®)應用落地。
同時,MAXIPILOT®2.0 Lite也是行業內唯一支持BEV部署的前視一體機高性價比算力平臺方案,定位覆蓋日常行車70%以上場景的千元級別產品。基於單個BEV一體機數據閉環,快速獲取關鍵路口/特殊道路拓撲等場景數據,高效開城。
MAXIPILOT®2.0 Pro,基於5R6V的傳感器配置,單SOC實現行泊高度合一,是中算力平臺性價比之選,支持實現全場景高速NOM、記憶行泊車等智慧化功能方案。
MAXIPILOT®2.0 Pro支持占用空間網絡部署,支持輸出BEV特征抽取後的特征地圖(DREM-Deep learning REM),以數據合規方式上傳雲端,同樣通過記憶地圖共享實現高效開城。

MAXIPILOT®2.0 MAX主推nR9V的傳感器配置方案,支持輕地圖拓展城區NOM領航輔助駕駛方案,能夠更好應對城區復雜環境及交互。同時方案可選前向激光雷達,作為城區視覺冗餘的多重保障。
MAXIPILOT®2.0 MAX的亮點在於可以通過復用2.0 Lite和2.0 Pro積累的海量價值數據,實現成本可控、節奏可控的開城。
總結一下,智駕科技現在在做一件足夠超前且又很決絕的事——果斷扔掉CNN的包袱,用BEV+Transformer重構之前所有產品。
而BEV+Transformer帶來的,不僅僅是智駕功能體驗上的大幅改善,還指向一條統一技術框架、數據高度復用的量產之路。幾乎完美解決入門智駕系統裝機量大但數據價值不高,而高階系統裝機量小數據不足的問題。
智駕科技為啥這麼剛?
智駕科技之前在自動駕駛圈曝光率、話題性並沒有其他明星公司那樣高,是一個十足低調但實力不容小覷的“掃地僧”。
創始人、CEO周聖硯,畢業於北京理工大學、MIT,2016年就創辦智駕科技。

智駕科技從一開始就堅定的走漸進式自動駕駛路線,並且和其他所有創業公司不同,打一個提前量,幾乎獨自吃下一片藍海——
商用車主動安全系統。
2020年起,我國強制中大型商用車標配主動剎車、車道偏離預警等等功能,智駕科技迅速抓住這一機遇,客運貨運雙管齊下,提供AEB、LCC等基礎L2功能,幾年內覆蓋市面80%以上商用車品牌,出貨量遙遙領先。

借助商用車ADAS歷史機遇起飛後,智駕科技還是以熟悉的L2切入乘用車市場,並且在這兩年中,實現數十款量產車型的產品搭載,同時自動駕駛裡程累積,也超過3億公裡。
“智駕模式”,是一條獨特的“商用包圍乘用,L2包圍L3”的“升維”路線,以技術補成本,快速規模量產的模式。開創自動駕駛創業的一個新“門派”
而在如今BEV成為主流後,智駕科技以幾乎相同的底層邏輯,給出量產高階智駕的新思路:低階帶動高階,以規模化“拼圖”的方式,實現NOA快速開城。
同樣也提供量產智駕的一種新參考。