如何讓一個機器人尷尬?波士頓動力發佈Atlas失誤集錦,全網圍觀機器人翻車的各種樣子!上周,波士頓動力公司分享一段仿人機器人Atlas變身“工地打工機器人”的視頻。視頻中的Atlas活動自如。抬抬木板、搬搬磚什麼的,都不在話下,還能愉快地轉個圈。
輕松跳上臺階後,Atlas轉身起跳,順利把一袋工具包穩穩地扔給腳手架上的建築工人。
收工下班,Atlas又高興地來個原地360°後空翻。更神奇的是,在站穩後,它還會握拳給自己鼓勵。
所謂“臺上一分鐘,臺下十年功”。Atlas的精湛表演,離不開一次又一次的訓練。
周五,波士頓動力發佈一個Atlas表演花絮,讓我們看看這個機器人都有哪些“翻車”瞬間。
一個機器人的尷尬瞬間
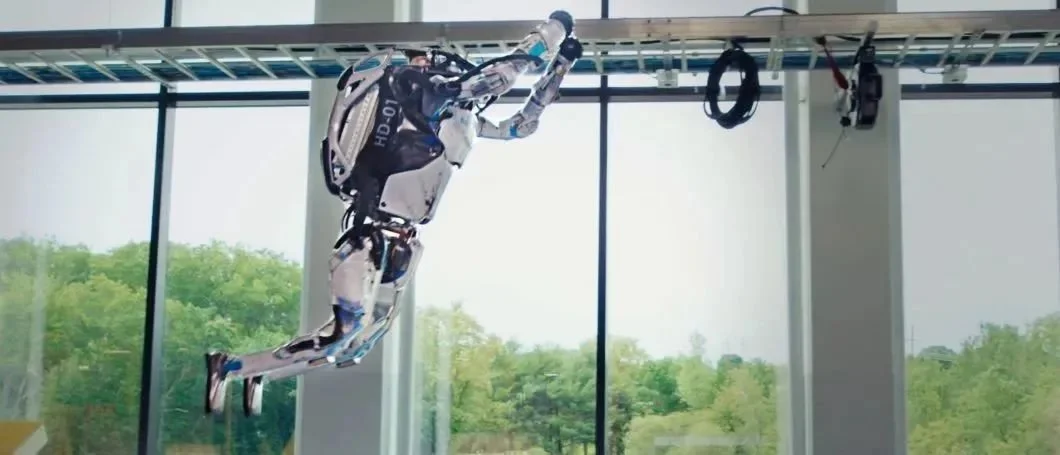
視頻中的場景與上周發佈的視頻類似。Atlas的動作也與前者類似,隻不過都是失誤版本。它可能在向後滑行時被自己絆倒,然後摔個四腳朝天。

或者是過獨木橋的時候一個腳滑,人仰馬翻。
類似的翻車現場還有很多。有“人財兩失”的:

有搬不動原地開擺的:
還有“以頭搶地”的:

如果Atlas會說話,看到這個視頻的它,一定會一個後空翻鉆到地縫裡吧。

逆襲的秘密
那麼,Atlas是如何成功逆襲的呢?
為改進Atlas的表現,波士頓動力團隊歷時五年,對機器人進行多次迭代,不斷提升Atlas的環境感知能力和適應能力。與此同時,Atlas自主行動的能力也得到增強。
要完成各種復雜的操作,首先得在運動中保持平衡。
最初的Atlas走路踉踉蹌蹌,行走過程中身體仍較為僵硬,在快要摔倒的時候無法調動全身,隻會通過改變步伐來重新尋找平衡。
在研究人員的努力下,Atlas像新生兒一樣,逐漸學會揮動雙臂來保持身體平衡。研究團隊使用五次樣條生成高級所需運動(例如擺動腳軌),將給定的腳步位置用作樣條的結點。

波士頓動力的團隊表示,機器人身體結構和人類有很大差別。例如,它沒有脊椎和肩胛骨,手臂也較為脆弱。
因此,團隊必須根據Atlas的尺寸和復雜性,對它的重量、強度、活動能力等要素進行權衡,並不斷優化控制算法,從而更好地協調它的各種動作。
別看它是個1米5的大個兒,Atlas在機器人界可謂身輕如燕。
為保持機身靈活性,Atlas利用3D打印來減輕重量和空間,從而形成具有高強度重量比和大工作空間的機器人。
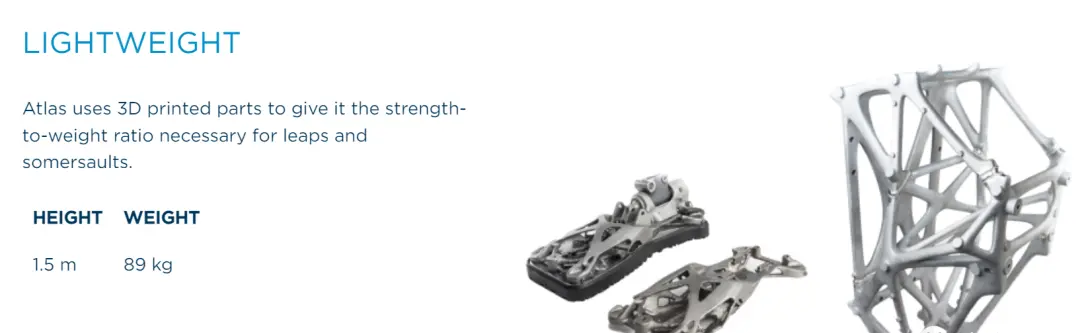
波士頓動力的工程師Aaron Saunders說,
通過3D打印。我們能顯著減少肢體慣性,這對於步行機器人來說是一件大事——系統中的大部分能量都用於在空中擺動沉重的雙腿。
此外,Atlas還能夠通過立體視覺、距離感應和其他傳感器自主或通過遠程操作感知障礙物並穿越崎嶇地形。研究團隊為Atlas提供一張高級地圖,其中大致描述它的行動路線和相應位置應該做出的動作。
Atlas利用這些信息為自己導航,並感知周圍環境,根據感知到的實時數據,自主規劃整個行動,以完成各項任務。
Atlas執行的每個動作都源自其行為庫中的動作模板,它可以根據目標情況自主從庫中選擇相應的動作執行。
同時,Atlas的模型預測控制器(MPC)會調整其發力、姿勢、動作發生時機等細節,來應對環境、腳滑等各種可能實時出現的因素。
並且,MPC還允許Atlas跨行為邊界預測下一步的行動,比如它知道這次跳躍後是一個後空翻後,就可以自動地創建從一個行為到下一個行為的過渡,使每一步動作都自然地連貫起來。
五年的迭代,Atlas從踉踉蹌蹌到輕松後空翻,像是完成人類四分之一的旅程。
相信看到它如此完美的表現,波士頓動力的“老父親們”,也會像完成後空翻的Atlas一樣,振臂高呼吧。