論畫餅,馬斯克爭第二,沒人敢爭第一。2016年,特斯拉CEO埃隆·馬斯克展示一段“特斯拉自動駕駛”的演示視頻——一輛特斯拉ModelX,從加州MenloPark出發,“自動駕駛”到位於PaloAlto的特斯拉總部。在長達3分45秒視頻中,這輛特斯拉自動的在城市、郊區和高速公路上行駛,全程沒有任何人為幹預。
然而,前不久路透社就爆出一個大瓜:“特斯拉宣傳自動駕駛的這段視頻是演的。”
按照特斯拉自動駕駛軟件總監Ashok Elluswamy的說法,該視頻是在預定路線上使用3D映射制作的,消費者無法使用該功能。此外,他還提到,“該視頻的目的並不是要準確描述 2016年客戶可以使用什麼。它是為描述可以構建到系統中的內容。”
簡而言之就是,畫餅。
特斯拉“視頻造假”風波還未平息,國內造車新勢力也跟風畫起大餅。
2023年1月28日,春節後開工的第一天,理想汽車和小鵬汽車相繼宣佈今年“城市級自動駕駛”的規劃。其中,小鵬汽車董事長何小鵬宣佈,2023年在中國率先推出全自動駕駛,在中國超過50個城市能夠放手自動駕駛;而理想汽車創始人李想則宣佈,城市NOA導航輔助駕會在2023年底開始落地。
一夜之間,消費者眼前出現一幅“自動駕駛時代來臨”的繁榮景象。
互聯網沒有記憶,但虎嗅汽車是有的。就在一周前的1月20日,一輛理想L9在開啟高速NOA導航輔助駕駛功能狀態下,以超過100km/h的時速,徑直撞向從右側變道的車輛。涉事車主發文稱,“理想的車機沒有任何預警和主動剎停的動作。”具體的事故原因,目前官方仍未正式公佈。
顯然,未來到來的,還沒有那麼快。

不光是理想,以特斯拉、蔚來、小鵬為首的造車新勢力們,都曾因為輔助駕駛類功能而造成過有人員傷亡的交通事故。但即便如此,各大車企仍樂此不疲地開放更多的功能。前兩年,車企宣稱要讓用戶們在高速上“脫手”,今年開始則嚷嚷著在城市裡“放手”。
但是,國產車下一個大餅,還真不該拿消費者的命來畫。
小心!車企在玩文字遊戲
城市級自動駕駛,是2023年車企必卷的方向,沒有之一。
核心原因在於,智能化的創新已然乏力。一方面,智能座艙裡頭的創新趨於同質化。如今隨便一臺智能汽車,車載屏幕的顯示素質基本都能媲美傢用電視,車內座椅分分鐘代替傢裡的沙發。在車裡追《狂飆》已經是基本操作,在車機上玩大型主機遊戲就屬於是“高級玩傢”。
但另一方面,車企還要佈局未來,讓用戶在車內有更多的娛樂時間。那麼必須把駕駛員從駕駛任務中解脫出來。特斯拉FSD(Full Self-Driving)的目的大抵也是如此——讓車自己開,讓人去玩車機。
現在市面上所謂的“全自動駕駛”、“全場景智能駕駛”,無一例外都是將“泊車、城區、高速”這三大場景進行拼接,最終組成從A點到B點的自動駕駛。
首先,最為簡單的場景就是泊車。由於車速較低、涉及的道路參與者和障礙物較為簡單,所以幾乎所有的新能源車型都能支持自動泊車功能。
其次,難度進階的下一層場景是封閉道路。特斯拉最早是在2019年,向中國用戶推送高速NOA(Navigate on Autopilot,自動輔助導航駕駛)功能。

特斯拉 NOA
從2020年開啟,“蔚小理”相繼實現類似的高速NOA功能。但為凸顯差異化,蔚來和小鵬都進行重新包裝。像蔚來的高速導航輔助駕駛功能就叫NOP(Navigate On Pilot)、小鵬的叫NGP(Navigation Guided Pilot),毫末智行的則叫NOH(Navigation on HIPilot)。

理想L8 NOA功能官方演示
本質上,NOA功能並不是一項全新的、顛覆性的技術,而是把我們常見的ACC自適應巡航、LKA車道保持輔助、ALC自動變道輔助和高精地圖定位,這四者進行一個無縫的集成。所以,與以前輔助駕駛功能相比,NOA功能的差異點就在——定位。
像理想汽車官網對NOA功能的描述是:“基於亞米級高精度定位能力,自主超車、調速與出入匝道”。通常,支持NOA功能的車型都需要搭載一套“組合導航系統”,其核心是高精度定位單元(GNSS+IMU)。其中,GNSS是全球衛星導航系統,IMU是慣性測量單元。
有組合導航系統,車輛就能夠獲得三類信息:第一類為坐標信息,如經緯度、 高程,可以區分高架上下、隧道和地庫;第二類為姿態信息,包括道路行車過程中的側傾、俯仰等; 第三類是動力學信息,包括加速度、速度、角速度。在此之上,通過GNSS 、IMU、高精地圖三者相互配合、補足,自動駕駛系統才能夠獲取到高精定位,從而“讓車輛知道自己身處何方”。
無論NOA功能的名字如何被包裝,N字必須排在首要位置上。N所代表的導航,指的是高精度組合導航定位系統,有它,NOA功能才能得以實現。即便是特斯拉的純視覺再牛,它也需要GNSS和IMU來提供厘米級別定位,視覺傳感器則提供相對定位,三者共同完成高精定位,最終實現NOA。
NOA功能先被應用於高速場景,主要是因為高速公路的道路參與者相對簡單、變化性相對較低。並且,中國城際高速公路和城市快速路加起來也就30萬公裡,遠低於全國的城市道路的近1000萬公裡。數字。這時候,高精地圖的鮮度和覆蓋率,就可以達到自動駕駛系統的使用要求。
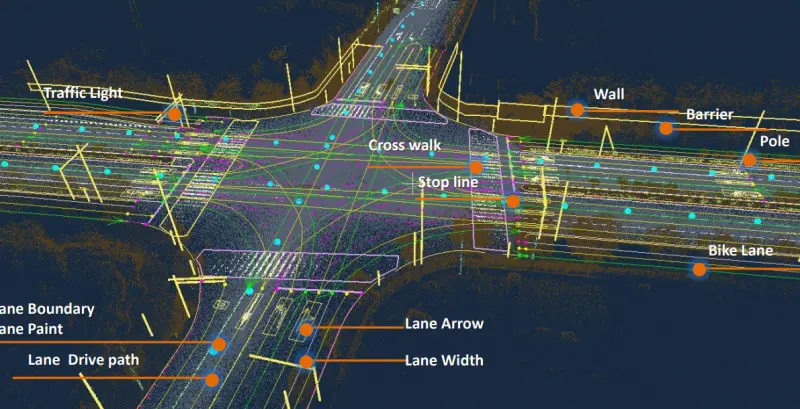
通常來說,高精地圖提供的信息包括:道路類型、曲率、車道線位置等道路信息,以及路邊基礎設施、障礙物、交通標志等環境對象信息,同時包括交通流量、紅綠燈狀態信息等實時動態信息。這就相當於給自動駕駛系統一根“拐杖”。
在開啟高速NOA功能後,高精地圖將為車輛的自動駕駛系統提供道路先驗信息。為車輛縱向加減速、橫向轉向及變道等決策提供先驗信息;其次,可預知車道線、道路標識牌等交通要素的位置, 有助於提高傳感器的檢測精度和速度。
實際上,在特斯拉和“蔚小理”進行大規模量產之後,業內已經開始出現廉價的NOA解決方案。畢竟一套組合導航系統的成本也不高,攝像頭+毫米波雷達的感知硬件又可以跟其他功能進行復用,隻要添置一套性能和成本兼顧的計算平臺,找一傢價格實惠的高精地圖供應商,基本就能實現物美價廉的高速NOA功能。哪怕是15萬以內的低端車型,也都能實現特斯拉需要花3萬2選配才有的功能。
註意!出事司機要負責
高速NOA功能在全行業的快速普及,讓“蔚小理”有危機感。尤其是主打智能化的小鵬汽車,曾經有一段時間還把自動駕駛軟件包付費當作是其全新的商業模式。但隨著意外事故頻發、功能推新速度放緩,高速NOA功能對用戶的吸引力也開始下降。這時,城市NOA功能的落地,就不得不按下加速鍵。
據統計,已宣佈計劃在今年落地城市NOA功能的車企,至少就有5傢。

城市NOA功能,也並非一個全新的事物,隻是被車企們重新包裝一下而已。
因為,那些所謂的自動駕駛出租車Robotaix,其測試的功能本質上就是城市NOA。即便它們都掛著昂貴的設備、沒日沒夜的上路跑測試,但至今也沒見得實現遠超人類駕駛員的可靠性、通行效率和乘坐舒適性。時至今日,大多數測試車還是被圈在北京亦莊、廣州南沙、上海安亭等地的電子圍欄裡。
很多人高估NOA的普及速度,低估城市NOA的開發難度。毫末智行CEO顧維灝告訴虎嗅,“現在城市裡面的環境非常復雜,包括靜態環境,例如車道線的磨損和重劃,路口之間的間距。以及動態環境中,各種各樣的機動車、兩輪車、行人等。”
根據小鵬汽車的數據顯示,其城市NGP的代碼量是高速NGP的6倍,感知模型數量是高速的4倍,預測/規劃/控制相關代碼量是高速的88倍。但更多的車企,是明知山有虎,卻偏向虎山行。因為根據小鵬自己的數據,一位車主的平均總用車裡程和用車時間中,城市道路占比高達71%和90%。
“城市NOH其實是實現全自動駕駛的一個觸發器。”在顧維灝看來,假設MPI(Miles Per Intervention,每兩次人工接管之間行駛的平均裡程數)隻有500米,那麼L4就是不切實際。但如果城市NOA的MPI能夠達到5公裡,這個時候就是摳動扳機,開始更多投入的時候。因為距離真正的L4越來越近。
簡而言之,啃不下城市NOA這塊硬骨頭,全自動駕駛就是無稽之談。

集度ROBO-01(視頻源:集度汽車)
但現階段,幾乎所有的自動駕駛測試車輛,都宛如一個“移動路障”。
比如,上方這段路測視頻片段,是集度ROBO-01工程車。集成百度Robotaxi能力的集度,第一次在廣州進行路試。但實際上路的效果,卻是慢慢悠悠、悠哉悠哉,就連一旁的外賣小哥都能輕松完成超越。再比如,小鵬P5的城市NGP功能,在交匯路口時就表現得像一位剛拿到駕照的新手司機。

小鵬P5(視頻源:新出行)
“通行效率低的原因,主要是自動駕駛系統用更保守的駕駛策略。”智能汽車創新研究平臺HiEV合夥人洪澤鑫向虎嗅分析道,自動駕駛車輛一般不會超過道路限速行駛,但其實大部分社會車輛都會超。“它是比較守規矩的,所以通行效率低。”
尤其是在高速公路匝道上,依據《中華人民共和國道路安全法》的規定,限定車速為40公裡/小時。但如果你在現實中以這個時速行駛,跟在後車必然會“口吐芬芳”。
駕駛策略的問題還算好解決,而系統的安全性才是地獄級的挑戰。洪澤鑫向虎嗅表示,“高精地圖對安全性有一定的影響。如果你開到某一個區域遇到高精地圖出現缺失,那麼就會導致系統退出。例如突發的道路施工,會產生與高精地圖的偏差,用戶需要及時接管。”
在城市裡依賴高精地圖來使用NOA功能,則更像是駕駛“有軌電車”。嚴格按照軌道行駛時,它可以做到安全、可靠。一旦軌道斷,乘客的安全性就無法得到保障。最致命的問題就在於此——人類駕駛員壓根就不知道,高精地圖會在什麼時候、什麼地點出現缺失。
如前文所說,高精地圖在高速NOA功能中起到神效,為系統提供“上帝視角”。而理論上講,如果城市NOA能夠擁有高鮮度的高精地圖數據,同樣可以實現較好的用戶體驗。但現階段,由於監管的要求,城市范圍內的高精地圖測繪制作充滿挑戰。尤其是像北京這樣的一線城市,即便是通過層層審核,高精地圖的數據並不能完整的覆蓋所有行車場景。
像目前,小鵬P5的城市NGP、極狐阿爾法S Hi版的NCA,都需要依靠高精地圖的數據支持。所以,其功能覆蓋的城市少之又少。像小鵬就僅在廣州開通,背靠華為的極狐也僅在上海、深圳等地開始交付城市NOA功能。極狐的官網上,就明確寫到一行小字:“NCA智駕導航輔助需在國傢法規允許以及高精地圖開放的情況下使用,依賴於各城市對高精地圖的行政審批通過(某些行政管轄區可能會需要更長的時間),該功能推送時不能覆蓋所有城市,將依據各城市審批情況逐步開放。”

毫末智行 城市NOH
從效率和安全的角度來說,城市NOA功能避免過度依賴高精地圖才是更優解。並且,車端實時感知和計算的能力的增強,使得規模化部署的理論可行性更高。
“差不多在2016年左右的時候,視覺感知的能力非常有限,看得不遠,算力也不行。”顧維灝在加入毫末智行前曾擔任百度地圖副總經理,主導過高精地圖的采集。在他看來,早期高精地圖技術是作為輔助手段,來補齊當時自動駕駛技術在感知層面的短板。“現在車端算力大200多倍,攝像頭的個數從一個變成十幾個,像素也高很多。之前的假設條件已經發生很大的變化,技術的實現方案也該隨之調整。對此,特斯拉做得更加決絕。”
馬斯克就公開表示,“過分依賴高精度地圖會讓自動駕駛系統變得極其脆弱,普及起來更加困難。”實際上,特斯拉從高速NOA功能開始,就擺脫高精地圖的依賴。在進入到FSD完全自動駕駛功能的開發時,特斯拉純視覺的路徑走入深水區。
再等等!技術成熟還有待時日
從單點功能的實現,到全場景、全范圍的覆蓋,就像一個“打怪升級”的過程。而反過頭來看,每一個階段都會象征性的裡程碑。
首先,硬件參數必須達到拉滿。
因為城區場景極其復雜,車道信息、交通標志等關鍵要素的感知識別,需要消耗大量的算力。像蔚來第二代平臺車型,都搭載4顆英偉達Orin-X芯片,總算力達1016TOPS(處理器運算能力單位)。但這顯然是“性能過剩”,因為支撐FSD完全自動駕駛的特斯拉HW3.0,算力也才達到144TOPS。
相對較保守的小鵬G9、理想L9則用兩顆Orin系列芯片,得到508TOPS的算力。毫末智行用的5nm高通驍龍8540+7nm高通驍龍9000方案,算力達到360 TOPS。最“節約”的莫過於極氪。隻有用2顆Mobileye EyeQ5H,總算力為48TOPS。
理論上,L2級別需要的計算力小於10TOPS,L3約為30-60TOPS,L4需要大於100TOPS的算力,而L5預計需要大於500TOPS 的算力。考慮到算力冗餘的需要,城市NOA功能所對應的L3級,最多到200TOPS也就夠用。所以,大部分的智能汽車,還是“算力過剩”。
小鵬P5(視頻源:新出行)
算力是夠,但感知層面的短板還有不少。
像上面這個片段,就是比較有代表性的“靜止車輛”場景。在視頻車輛穿過十字路口時,左前方準備完成掉頭的“黑車”突然起步,並阻擋視頻車輛前進的路線。從畫面可以看到,小鵬P5的SR環境模擬顯示界面中並未檢測出這輛突然起步的“黑車”。
市面上,很多車型都開始搭載激光雷達。但絕大多數車型,用的是半固態激光雷達,主要用於中長距離的探測,來識別車輛前行方向上的靜態和異形障礙物。然而,它們並不能很好的識別兩側的威脅。
比如,在高速公路上,遇到超寬貨車時,系統就不能精準把控鄰車輛間距;在城市擁堵的十字路口,車輛無法妥善處理大量VRU(弱勢道路使用者,一般指行人、兩輪車)的場景,更何況這時還經常會出現人車合流的情況。如果側向的距離感知能力較弱的話,車輛很可能會對其他道路參與者可能會產生威脅。
對此,當前有車企選擇為車輛佈置補盲激光雷達。例如禾賽的FT120,就具備超廣角視場,通常被放置在車身兩側以及側後方位置,以便在路口轉向、車輛加塞、主動超車、自動泊車等場景下,提升環境感知能力,避免危險的發生。

極狐阿爾法S Hi版(視頻源:張扛扛)
其次,最能拉開研發差距的,可能就在算法層面。
2021年夏天,特斯拉自動駕駛技術負責人Andrej Karpathy在AI Day上,公開 FSD 自動駕駛系統中采用的算法,而Transformer則是其中最核心的模塊之一。在國內,毫末智行很早就提出將Transformer神經網絡與海量數據進行有效的融合;在前兩天李想也提到,理想汽車的城市NOA將基於BEV感知和Transformer模型來實現。
由於篇幅關系,這裡我們不對BEV和Transformer的概念進行贅述。我們隻需要知道,Transformer對特斯拉FSD帶來的能力提升是非常明顯的。
由於是純視覺方案,特斯拉本就對“眼觀八方”有著更高的要求,而Transformer就可以基於全局視野,預訓練出一些能夠對物體深度信息進行準確感知和預測的算法模型,逐步實現2D圖像-3D空間-4D空間的搭建,讓世界看起來更真實。而在規劃控制方面,Transformer預訓練多套算法模型,對博弈策略有較大提升,保證自動駕駛的安全性與高效性。
在特斯拉純視覺感知的基礎上,毫末的團隊還加入激光雷達的數據。並基於Transformer神經網絡模型來進行空間、時間、傳感器三個維度的融合,從而去提升感知算法的準確率。尤其是解決棘手的紅綠燈檢測和識別,距離擺脫高精地圖和車路協同又進一步。
最後,算法的持續迭代,更離不開數據的閉環。
隨著所需處理的數據開始指數級增長,特斯拉也在提高訓練神經網絡的算力。
因此,在2021年8月,特斯拉正式發佈自研的雲端超算中心Dojo。Dojo來源於日語,意思是 “道場” 。顧名思義,這個道場就是專門用於處理,大量訓練特斯拉自動駕駛汽車AI軟件數據。來自全球超百萬輛特斯拉的數據將匯聚於此。

實際上,無論是開發城市NOA,還是其他智能化功能,越是研發的深入以及用戶規模的擴大,自建計算中心的重要性就越發凸顯。比如像毫末智行之前的數據標註、大模型的訓練、仿真驗證等工作,都是在公有雲上進行。但隨著數量的積累,公有雲的效率會存在限制,成本也會變得很貴。
這就要求車企自建私有雲和計算中心,以便處理海量的業務需求。
在2023年1月,就已經有兩座計算中心上線。1月28日,吉利星睿智算中心正式上線,其支撐吉利旗下的智能駕駛業務、智能網聯、電池雲端BMS、新能源汽車安全服務等。再往前推,1月5日,毫末智行與火山引擎聯合發佈智算中心雪湖 · 綠洲,通過數據管理能力、算力優化、訓練效率的提升,來加速城市NOA功能的落地和擴張。
總之,現階段的算力和感知已經進入平穩發展階段,要快速實現城市NOA以及最終的全自動駕駛,關鍵是要看“算法能力 + 數據能力”。
中金曾發佈過一份名為《AI 視角下的自動駕駛行業全解析》的研究報告。報告指出,“深度學習是自動駕駛技術發展的分水嶺及底層推動力,算法是各廠商接下來應該重點佈局的核心能力,同時,數據是決定自動駕駛量產能力的勝負手”。
寫在最後
最後需要註意的是,城市NOA功能以及所謂的全自動駕駛功能,仍處於監管灰色地帶。
從城市NOA的名稱、技術體系到產業鏈相關環節,技術標準不健全、不完善的情況依然存在。不僅全球范圍內都沒有城市NOA專門的標準,感知系統的很多核心零部件及軟件都缺乏標準。
而那些已經有標準的領域,要滿足相關認證工作依舊艱難。例如業內相對成熟的激光雷達,其要進行的車規級認證包括國際汽車工作組IATF16949、國際標準化組織ISO26262及AEC-Q100等汽車行業通用標準。不僅認證難度較大,而且缺乏與現有技術相適應的詳細指標。
絕大多數的消費者,對於城市NOA功能還處在一知半解的程度,因此容易出現兩個極端,一是不敢用,導致性能過剩、資源浪費;二是過分信任,不遵守雙手不能脫離方向盤、雙眼不能離開前方的規定,輕則發生車輛剮蹭,重則造成人員傷亡。
因此,車企要在畫大餅的同時,保證消費者不能因為被貿然推出的不成熟技術影響人身安全。而消費者則需要為自己的安全負責,決不能因為別人的大餅,自毀前程。