近日,多起涉及輔助駕駛的交通事故再度將自動駕駛技術推向風口浪尖。8月8日,一輛理想ONE在開啟NOA(導航輔助駕駛功能)狀態下,徑直撞上一輛停靠在路邊的工程車。理想方面給出的調查結果顯示,車主當時雙手松開方向盤。
無獨有偶,8月10日,寧波一車主駕駛小鵬汽車撞向前方故障車輛,導致一名正在處理事故的人員被撞身亡,據稱車主正在使用LCC(車道保持功能)輔助駕駛功能。車主事後表示自己此前多次使用該功能都成功在障礙物前剎停,這次開車時“分神”。
兩天之後,又有網友爆料稱,自己在試駕小鵬汽車的過程中,銷售人員向其展示輔助駕駛功能,卻意外撞向前車引發事故。該網友表示,銷售人員在車輛沖向前車時仍舊十分“自信”地不踩剎車。
這幾起事故有著兩個明顯的共同點:一是駕駛人對輔助駕駛功能無條件的信賴;二是輔助駕駛並未能像駕駛人所期待的那樣發揮功能。
事故發生之後,不少網友評論說自動駕駛技術不可信。但如此評價實則略有偏頗,輔助駕駛並不等同於自動駕駛。而大眾對於這兩個概念的混淆,部分企業也難辭其咎。
輔助駕駛和自動駕駛,有何區別?
“不管叫NOA還是叫NPG,說破天也不能叫自動駕駛。舉個簡化的例子,自動洗衣機從按開始鍵就要自己完成所有清洗程序,如果衣服沒甩幹,這就是洗衣機的問題,不能說是因為人沒接管。”一名汽車工程師在接受澎湃新聞采訪時表示,目前車企量產車輛所搭載的功能均屬於輔助駕駛范疇。
輔助駕駛和自動駕駛究竟有何區別?其實國傢標準已經對二者進行清晰的劃分。
由國傢市場監督管理總局、國傢標準化管理委員會批準發佈的《汽車駕駛自動化分級》已於2021年8月20日發佈,並於今年3月1日起正式實施。
該標準將駕駛自動化分為從0級到5級,分別為應急輔助、部分駕駛輔助、組合駕駛輔助、有條件自動駕駛、高度自動駕駛、完全自動駕駛。
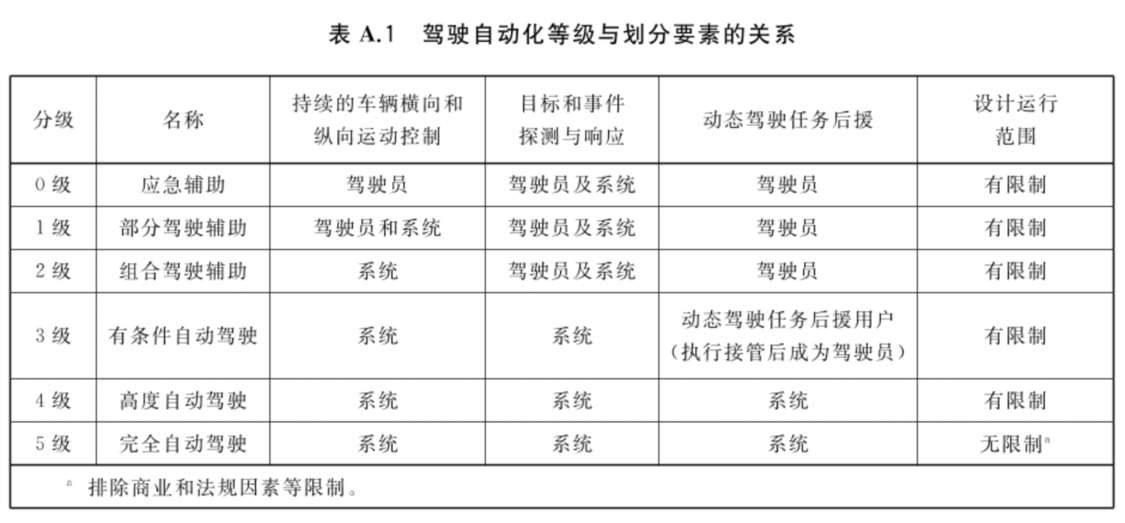
值得註意的是,標準明確2級及以下均為輔助駕駛,駕駛員需對車輛進行駕駛操作控制,並監管駕駛自動化系統;3級及以上駕駛自動化的名稱中才出現“自動駕駛”字樣,可由系統執行車輛運動的全部控制。
拋開晦澀的專業術語來說,其實自動駕駛跟輔助駕駛本質上的區別就是人還是系統在控制車輛。
輔助駕駛情況下,人開車,系統輔助功能為人提供方便、讓人開得更加輕松;而自動駕駛是系統開車,根據等級不同,人在特殊情況下以“後援用戶”身份接管或完全不接管車輛。
也就是說,目前普通車主開車,方向盤都必須握在自己手裡。
輔助駕駛功能被濫用,企業難逃幹系
輔助駕駛功能的發展並非一蹴而就,諸如車道保持、緊急制動、定速巡航等輔助功能其實早已被搭載到傳統汽車身上。那麼為何輔助駕駛、自動駕駛等概念會在近年來頻繁出現?
一方面是汽車電氣化轉型帶來的智能化機遇,電動汽車的車身結構更有利於電子信號在各部件之間的傳遞,能夠更好地推動技術的發展;另一方面,後來者需要講出新故事,實現與傳統百年車企的差異化競爭,方興未艾的自動駕駛便成新車企主攻領域。
於是乎,“智能輔助駕駛”“自動輔助駕駛”“L2+級自動駕駛”等生造詞語頻頻出現在車企的廣告中,更有不少車企高管、汽車博主等發佈雙手離開方向盤來喝咖啡、玩手機等所謂“自動駕駛”的視頻。
緊隨其後的便是不少消費者以身試險,更有甚者直接躺在駕駛座睡覺,任由車輛在高速上狂奔。
中國汽車流通協會常務理事賈新光曾表示,車企的這種宣傳,不僅對消費者產生一定的誤導,也讓很多用戶漸漸模糊自動駕駛和輔助駕駛的界限。
直到2021年8月14日,美一好公司創始人林文欽駕駛蔚來ES8在開啟NOP(領航輔助駕駛)狀態下發生車禍離世。此消息引發網絡對於“車企過度宣傳輔助駕駛”的熱議,也為車企自身敲響警鐘。
此後,多傢車企都將“自動”二字從廣告中抹去,並增加輔助駕駛功能在線考試等車主教育內容。
多傢車企也都對此紛紛表態。威馬汽車CEO沈暉表示,“ L2級別輔助駕駛功能,駕駛員是功能操作主體,也是責任主體。”理想汽車CEO李想則呼籲車企“在推廣上克制,在技術上投入,對用戶、行業、企業都長期有利。”
車企目前對於輔助駕駛技術的宣傳已較為克制,但不可否認的是,仍有不少銷售人員會在推銷過程中誇大其詞,也有部分車主為舒適而置安全於不顧。
為什麼不能把方向盤交給輔助駕駛?
在自動駕駛技術的演進路線上,目前發展出兩條路,一個是使用多傳感器融合,直接開發L4級自動駕駛,特點是成本過高、投入大,百度Apollo、Waymo等自動駕駛企業屬於這類。另一個則是自下而上,從輔助駕駛逐漸向自動駕駛過度,例如特斯拉、蔚來、小鵬等車企。
上個月百度發佈的第6代Apollo RT6無人車,即使已經完成大量路測,擁有豐富的路況數據和無人駕駛開發經驗,但還是留一手“雲代駕”。
從設計之初,雲端聯動、車運一體就是該車的核心能力,因為單車智能還存在著明顯的技術短板,對於L4級自動駕駛如此,對於L2級輔助駕駛更是如此。
人類司機在駕駛時要觀察道路情況、做出判斷、采取措施,系統也一樣,隻不過現階段系統的眼神、大腦都不行。
在信息采集上,目前被廣泛使用的傳感器主要包括:激光雷達、攝像頭、毫米波雷達、超聲波雷達。這些傳感器各有各的優勢,但缺點也都十分明顯。
毫米波雷達探測性能穩定、作用距離長、可穿透煙、霧等,但難以分辨近距離物體,尤其是對行人的識別能力很差。同時其對金屬物體比較敏感,碰到一些金屬物體,都會反射回波。若任由其對於道路上的金屬欄等做出反應,整個駕駛過程就像一輛“搖搖車”,體驗感極差。所以搭載上車的毫米波會過濾掉靜止的金屬物體。這也是許多輔助駕駛車輛徑直撞向前車的重要原因。
超聲波雷達通俗地講,就是我們日常使用的倒車雷達。其造價最為便宜,所以被大量應用到車上。但探測距離較短,一般僅有幾米,無法參與到道路行駛決策中。
車載攝像頭成像清晰,成本低,但探測距離短,對環境光照要求較高,例如在強光下,純白色的卡車往往會被攝像頭漏掉。此外,攝像頭高度依賴算法,需要不斷訓練。如果“眼睛”看到的一個東西,但辨別不出是什麼物體,“大腦”會默認過濾掉這個信息。例如特斯拉會將前車尾部的紅色絲帶識別為雪糕筒,因為視覺算法隻能依靠顏色、形狀等特點來將看到的物體與“大腦”中已儲存的標簽一一對應。
激光雷達可以準確感知周邊環境的三維信息,在近年來被寄予厚望,但對工作環境要求也很高,在天氣狀況不好時會受到極大的幹擾。因此,激光雷達還是要與毫米波雷達、攝像頭等進行數據融合,來得出更全面的周遭環境信息。
而最終的決策,是“大腦”通過多雙“眼睛”傳回的信息集合而成,那麼該相信哪雙眼睛、如何將大量信號轉化成一個可執行的命令,就需要一個強大的“大腦”,顯然目前的輔助駕駛系統還不能勝任。
因此,雖然搭載包括激光雷達在內的大量傳感器,小鵬、蔚來等車企都會明確提及,輔助駕駛系統隻是為減少駕駛疲勞感,而駕駛員才是駕駛的主體。