據悉,Waymo為證明其自動駕駛汽車比人類駕駛的汽車更加安全,於近日創建一個註意力高度集中的司機的虛擬代表然後在一系列模擬測試中讓這個假人跟自己的自動駕駛汽車對決以此來看看哪個更善於避免碰撞。
提高安全性一直是自動駕駛汽車(AV)行業的主要預測之一。由於全球每年有數百萬人死於車禍,自動駕駛汽車運營商越來越倚重這一安全案例以刺激監管機構通過立法,從而允許更多完全自動駕駛汽車上路。然而雖然這個論點表面上看起來很有說服力--自動駕駛汽車不會像人類一樣喝醉或分心也不會超速或違法--但沒有什麼數據能證明全自動駕駛汽車比人類司機更安全。
為給其論點提供更多的統計支持,Waymo制作兩篇新的科學論文,其將自動駕駛車輛的性能跟人類駕駛進行比較。據悉,第一篇文章分析並模擬車禍即將發生時的反應時間,而另一篇則提出一種新的方法來評估自動駕駛系統避免車禍的程度。
這種新穎的方法包括建立一個人類駕駛員的反應時間和規避行動的模型,該駕駛員不會受到影響,眼睛總是看著沖突。換言之,跟會經歷疲勞和分心的正常人類司機不同,這種虛擬的超人司機總是全神貫註、永遠不會疲勞或分心並隨時準備作出反應。Waymo稱這種類型的分析是第一次。
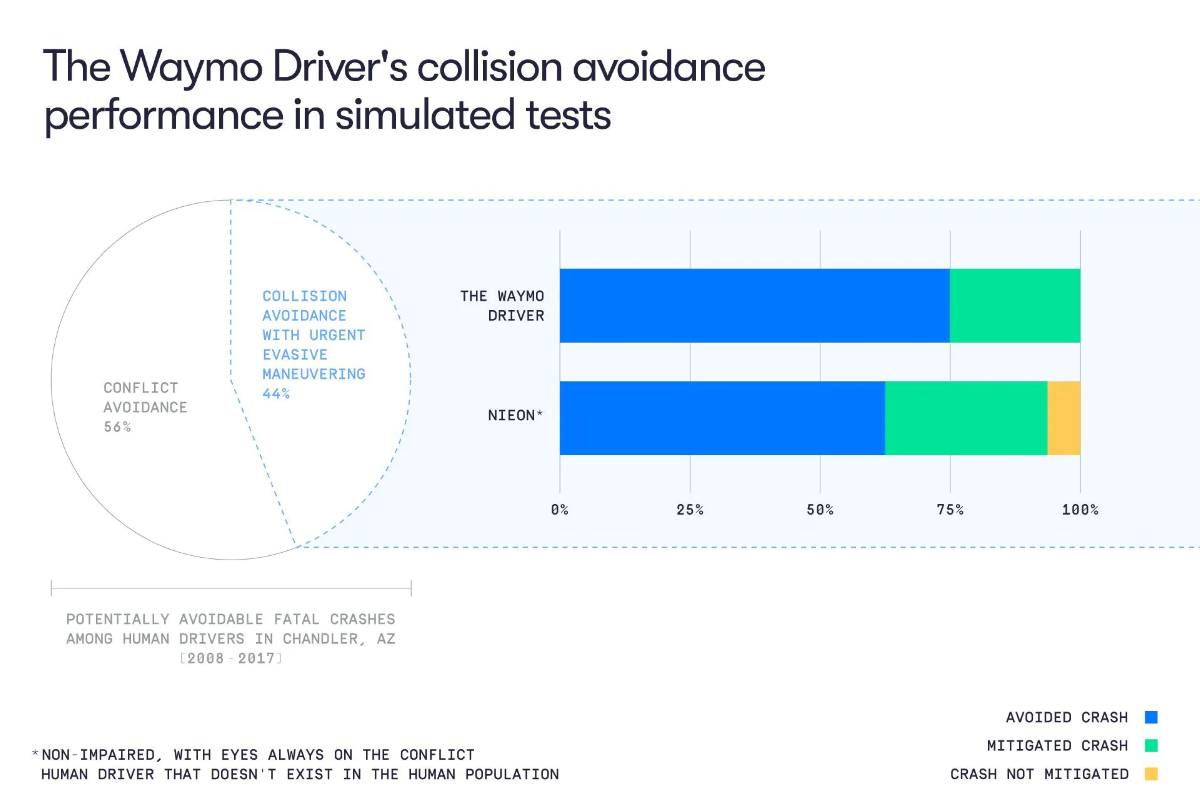
然後,Waymo模擬一些即將發生的不同碰撞場景,從而將NIEON司機跟自己的自動駕駛車輛進行比較。可以預見的是,這個超人司機在防止碰撞方面非常出色,其避免62.5%的模擬碰撞並在84%的情況下降低嚴重受傷的風險。
結果顯示,Waymo車輛做得更好,其避免75%的碰撞並將嚴重傷害的風險降低高達93%。
Waymo的安全研究主管Trent Victor告訴The Verge:“我們的表現一直超過人類的這一高標準。”
預測人類司機在車禍即將發生時的反應一直是幾代交通安全研究人員的挑戰。響應時間通常是在受控實驗中測量的,受試者被指示對聲音或剎車燈等刺激物做出反應。
反應時間研究的關鍵問題是何時“開始計時”:你從哪一點開始計算反應時間?這在自然環境中變得更加關鍵,因為行人和騎自行車的人並不總是以可預測的方式行事。許多確定反應時間的傳統方法並沒有考慮到緊迫感。他們傾向於高估司機的反應時間,假設他們在快速移動的情況下反應較慢或在緩慢移動的情況下反應較快。
但Waymo以不同的方式處理這個問題。在其研究中,它決定在司機感到驚訝或他們的預期被打破的時候開始計時。
“在緊急事件中,司機的反應盡可能快,而他們這樣做是因為他們非常驚訝,”Victor介紹道。
Waymo表示,通過利用來自更多自然駕駛研究的數據,它創建一個超過典型駕駛員的避免碰撞的內部基準。這給它一個新方法來評估其自動駕駛系統的性能,它稱之為Waymo Driver。
此前,該公司曾試圖通過模擬近十年來發生在亞利桑那州的幾十起真實世界的致命車禍來衡量其自動駕駛系統的安全性。Google的分拆公司發現,在兩車相撞的情況下,用其機器人引導的車輛取代任何一輛車幾乎可以消除所有死亡。
不過Waymo決定更進一步。由於它不知道在這些真實世界的車禍中有多少涉及醉酒、受損或過度疲勞的駕駛,該公司決定創建一個超人司機的模型,他們永遠不會疲憊或醉酒並且總能全神貫註地看著道路。通過利用其在反應時間測量方面的新基準,Waymo重新模擬之前研究中的車禍以看看這個司機會如何反應。
超人司機的表現確實很好,但Waymo司機做得更好--有時隻要比最好的人類司機更好就能完全避免碰撞。
目前還沒有評估AV安全的標準方法。RAND最近的一項研究認為,在沒有框架的情況下,客戶最有可能相信政府--盡管美國監管機構似乎滿足於讓私營部門來決定什麼是安全的。在這種真空狀態下,Waymo希望通過公開這些數據,政策制定者、研究人員甚至其他公司可能開始承擔起制定一個普遍框架的任務。
Victor表示,這兩項研究都經過同行評議並將提交給一傢期刊發表。“們正在遵循科學過程的運作方式,“他說道,“因此,然後由其他人來評論並在此基礎上進行研究。”