撲翼無人機可能比固定翼無人機更加靈活和節能,但它們中的大多數仍然不能在一個地方懸停,一個新的模型通過使用爪子機制以鳥類的方式暫時棲息在一個地點來解決這一限制。被命名為P-Flap的自主鳥類仿生撲翼直升機原型機翼展1.5米(59英寸),體重僅700克(25盎司)。它是由瑞士EPFL研究所的博士後RaphaelZufferey設計的。
作為歐盟GRIFFIN項目的一部分,他與西班牙塞維利亞大學的同事合作建造並測試該設備。GRIFFIN是指"通用順應性空中機器人操縱系統,整合固定翼和拍打翼以增加航程和安全性"的縮寫。

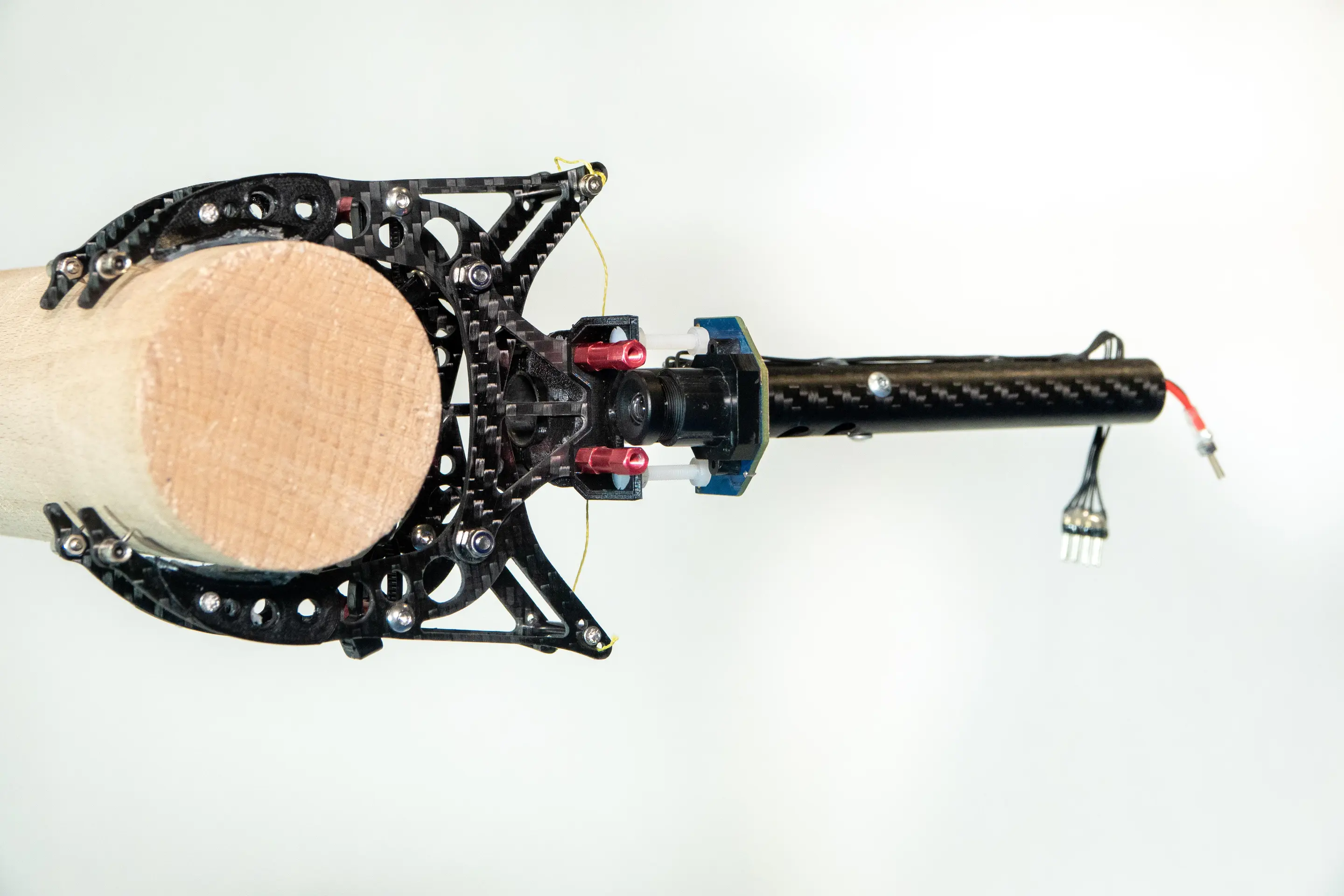
您可以在圖中仔細觀察P-Flap的爪子機構
為抓取樹枝或管道等目標,P-Flap配備一個碳纖維材質的彈簧機械爪。該裝置是雙穩態的,這意味著它不需要電源就能保持打開和關閉狀態。它通過一個電機驅動的腿連接到無人機的底部,可以根據需要移動它。
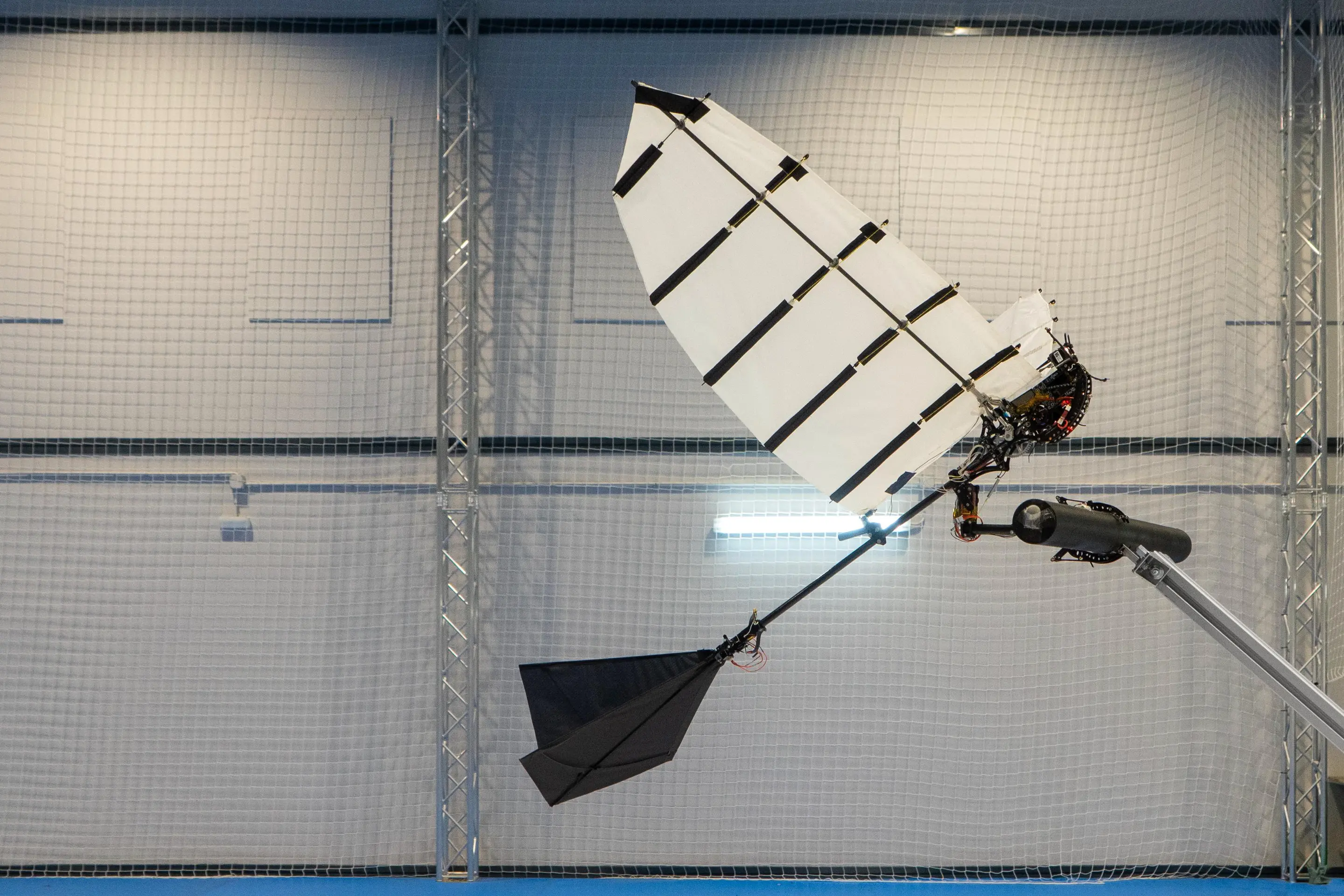
當P-Flap在其目前的室內測試裝置中接近一個水平桿時,它由外部運動捕捉系統無線傳輸的數據引導。這些數據使無人機知道它與桿子的相對位置,因此它的機載飛行控制系統可以調整其俯仰、偏航和高度,以便到達目標。
一旦它的爪子到達桿子的1米(3.3英尺)范圍內,爪子底部的線性視覺傳感器就會提供更精確的位置數據,激活腿部的電機裝置,使其精確定位。當爪子內部開放的兩個突起隨後擊中目標時,壓力會導致爪子在短短25毫秒內自動關閉,將P-Flap牢牢固定在指定地點,這和鳥類的做法如出一轍。當它要離開棲息地恢復飛行時,爪子軸上的電動螺旋裝置會再次將其打開。
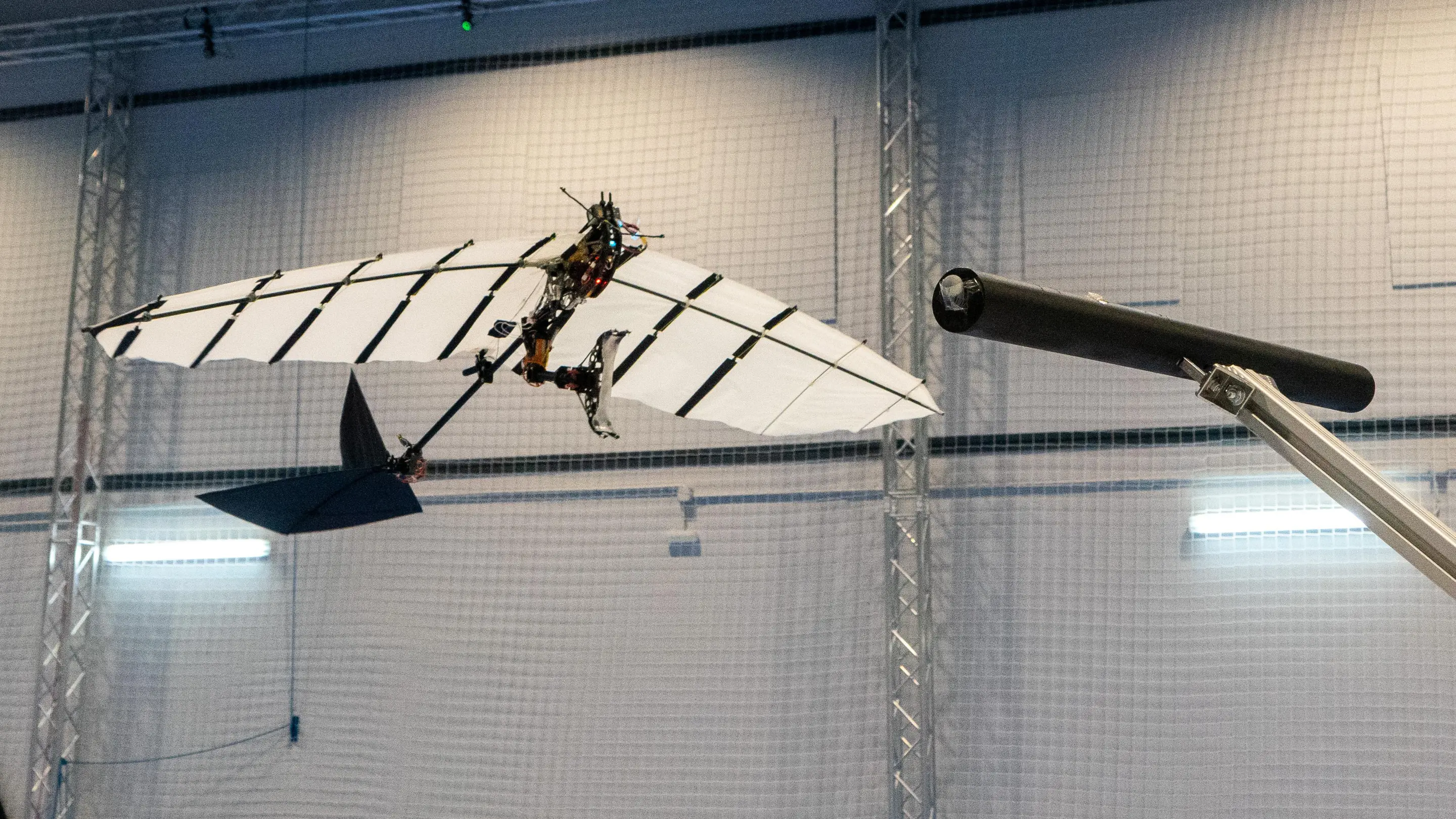
P-Flap接近其目標,距離地面2米(6.6英尺)
在現實世界中,可以想象無人機可以執行一些活動,如觀察陸地上的對象,從樹上收集生物樣本,或通過集成的太陽能電池板為其電池充電。也就是說,在此期間仍然需要做更多的工作。
Zufferey說:"目前,飛行實驗是在室內進行的,因為我們需要有一個可控的飛行區域,並通過運動捕捉系統進行精確定位。未來,我們希望增加機器人的自主性,以便在戶外更不可預測的環境中執行棲息和操縱任務"。
P-Flap在最近發表在《自然通訊》雜志上的一篇論文中進行描述。