麻省理工學院比特和原子中心的研究人員正在進行一個雄心勃勃的項目,設計能夠有效自我組裝的機器人。該團隊承認,自主自建機器人的目標仍然是"數年之後",但迄今為止,這項工作已經顯示出積極的成果。
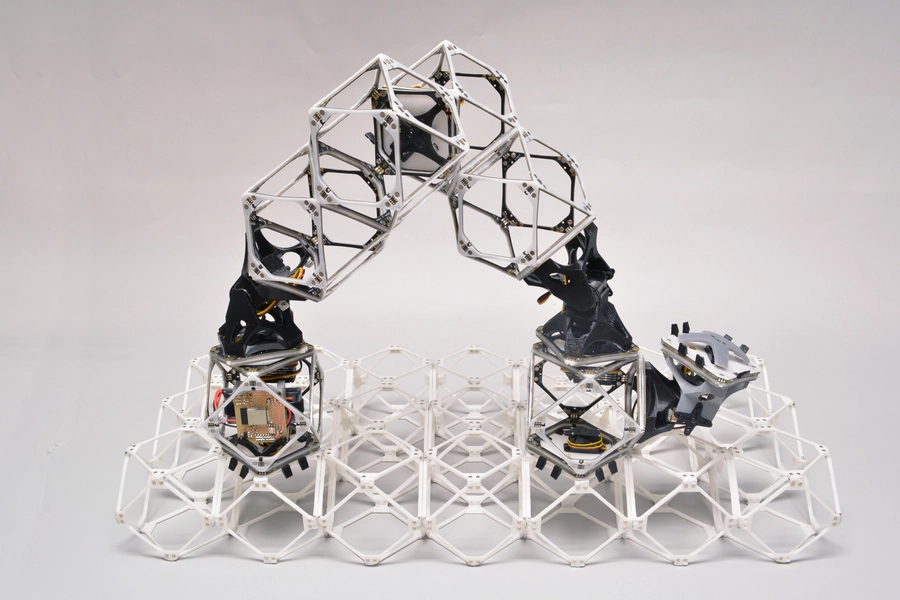
該系統的中心是體素(體積像素的簡稱,一個從計算機圖形學中借來的術語),它攜帶的動力和數據可以在碎片之間共享。這些碎片構成機器人的基礎,移動到網格上進行進一步組裝之前,可以抓取和連接其他體素。
研究人員在《自然》雜志上發表的一篇相關論文中指出:"我們的方法挑戰大型建築需要大型機器來建造的慣例,並且可以應用於今天需要大量資本投資的固定基礎設施或完全不可行的領域。"
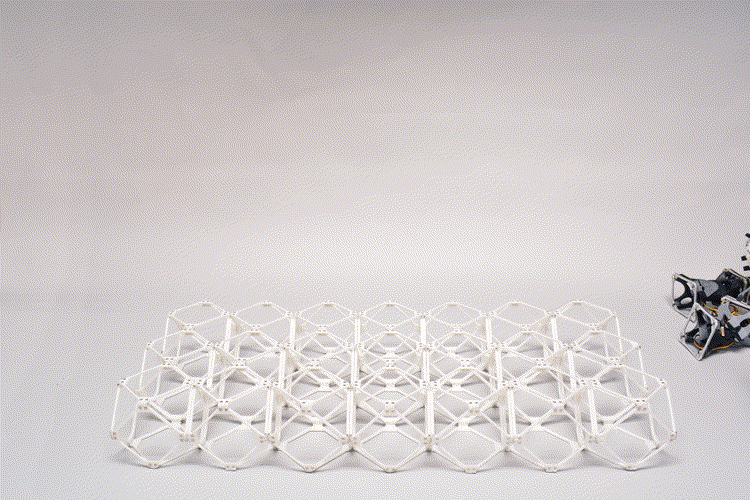
圖片來源/麻省理工學院
為這些系統開發適當水平的人工智能是一個很大的障礙。機器人需要確定如何和在哪裡建造,何時開始建造一個新的機器人,以及如何避免在這個過程中相互碰撞。
論文的共同作者Neil Gershenfeld在一份新聞稿中說:"當我們建造這些結構時,你必須建立起足夠的人工智能,結構性電子學的見解可以使體素能夠傳輸電力、數據以及力。"
除智能領域還需要努力外,硬件問題也仍然存在。該團隊目前正在努力建立更強大的連接器,以保持體素牢固拼合在一起。
麻省理工學院指出,最終這種機器人可以被用來確定最佳的建築結構以節省大量的時間用於原型設計。
雖然人們對3D打印房屋的興趣越來越大,但如今那些需要的打印機器與正在建造的房屋一樣大或更大。同樣,這種結構改由成群的微小機器人組裝的潛力可以帶來好處。美國國防部高級研究計劃局也對這項工作感興趣,因為它有可能被用來自主建造海岸保護結構以防止侵蝕和海平面上升。
美國宇航局和美國陸軍研究實驗室已經參與資助該項目。