韓國的研究人員已經開發出一種超小、超薄的LiDAR設備,它能將一束激光分成10000個點,覆蓋前所未有的180度視場。它能夠在一次拍攝中對整個視野半球進行3D深度測繪。

自主汽車和機器人要想在現實世界中安全和有用,就必須能夠非常準確地感知它們周圍的世界。在人類和其他自主生物實體中,這需要一系列不同的感官和一些相當特別的實時數據處理,對於我們的技術後代也可能是如此。
LiDAR--光探測和測距的簡稱--自20世紀60年代以來一直存在,它現在是一種成熟的測距技術,在開發特定空間的3D點雲表示方面特別有用。它的工作原理有點像聲納,但LiDAR設備發出的不是聲音脈沖,而是激光的短脈沖,然後測量這些脈沖擊中物體時的反射或反向散射的光。
最初的光脈沖和返回的脈沖之間的時間,乘以光速並除以2,就能告訴你LiDAR裝置與空間中某一特定點之間的距離。如果你隨著時間的推移反復測量一堆點,你就會得到一個該空間的三維模型,其中有關於距離、形狀和相對速度的信息,這可以與來自多點攝像機、超聲波傳感器和其他系統的數據流一起使用,以充實一個自主系統對其環境的理解。
據韓國浦項科技大學(POSTECH)的研究人員稱,現有LiDAR技術的一個關鍵問題是其視場。如果你想從一個點上對一個寬廣的區域進行成像,唯一的辦法就是機械地旋轉你的LiDAR設備,或者旋轉鏡子來引導光束。這種設備可能是笨重的、耗電的和脆弱的。它往往磨損得相當快,而且旋轉速度限制你測量每個點的頻率,降低三維數據的幀率。
另一方面,固態LiDAR系統不使用物理移動部件。根據研究人員的說法,其中一些系統--比如蘋果公司用來確保你不會通過舉起主人的平面照片來愚弄iPhone的面部檢測解鎖系統的深度傳感器--將一個點陣列投射在一起,並尋找點和圖案的失真來辨別形狀和距離信息。但視野和分辨率是有限的,而且該團隊說它們還是比較大的設備。
浦項研究小組決定利用超表面的非凡光彎曲能力,開發出具有最寬視野的最微小深度感應系統。這些二維納米結構的寬度隻有人類頭發的千分之一,可以有效地被看作是超平透鏡,由微小且形狀精確的單個納米柱元素組成的陣列。入射光線在通過元表面時被分成幾個方向,通過正確的納米柱陣列設計,部分光線可以被衍射到近90度的角度,一個完全平坦的超魚眼形態。
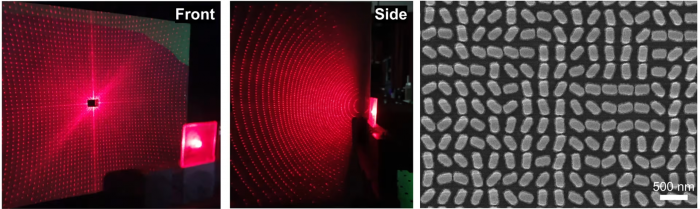
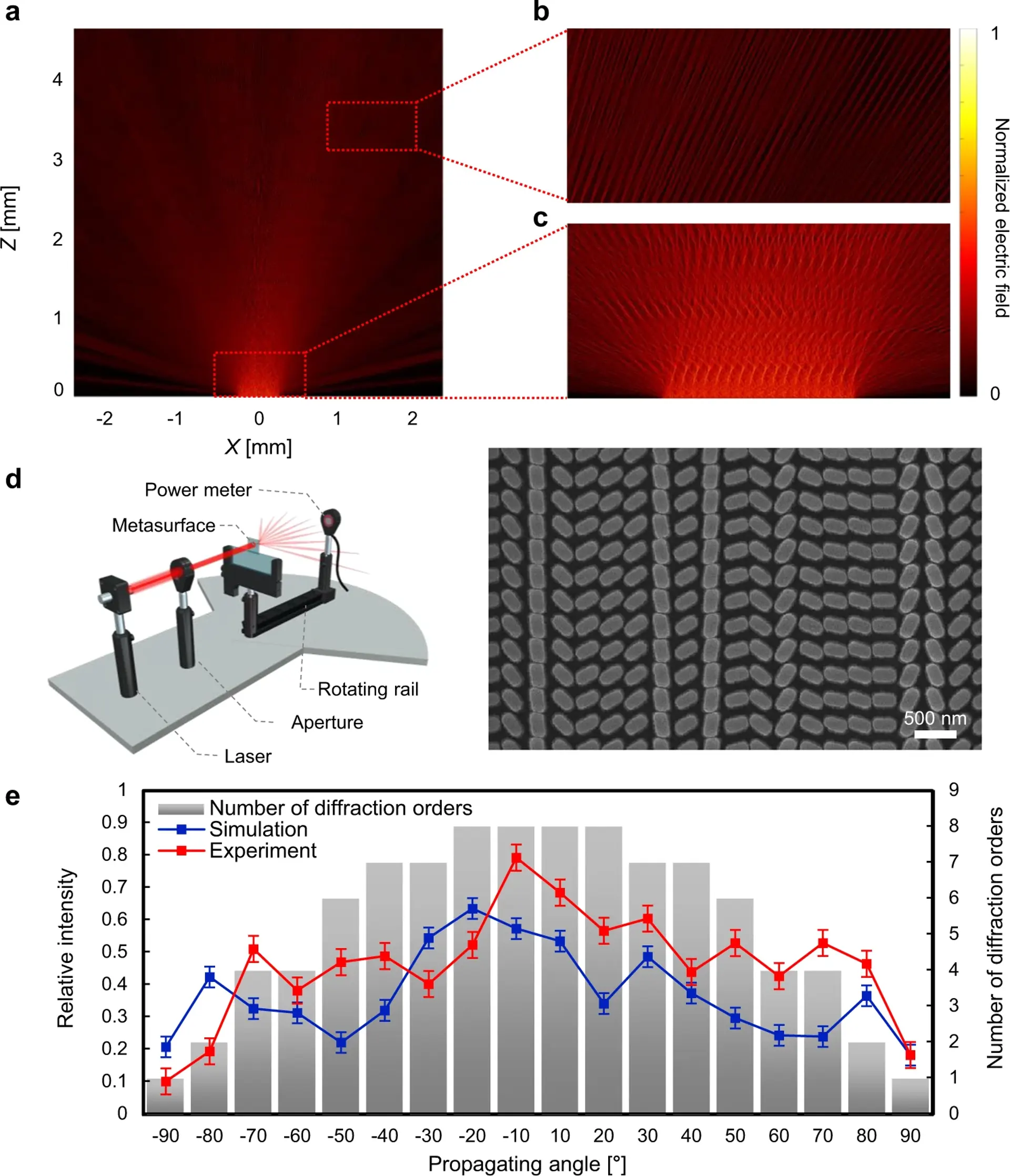
左圖:光束衍射圖案的正面和側面圖,顯示在較高的彎曲角度下的強度損失,以及隨著距離的增加,點位分辨率的損失。右圖:超表面上的精確形狀的納米柱陣列,它可以使光線彎曲近90度。
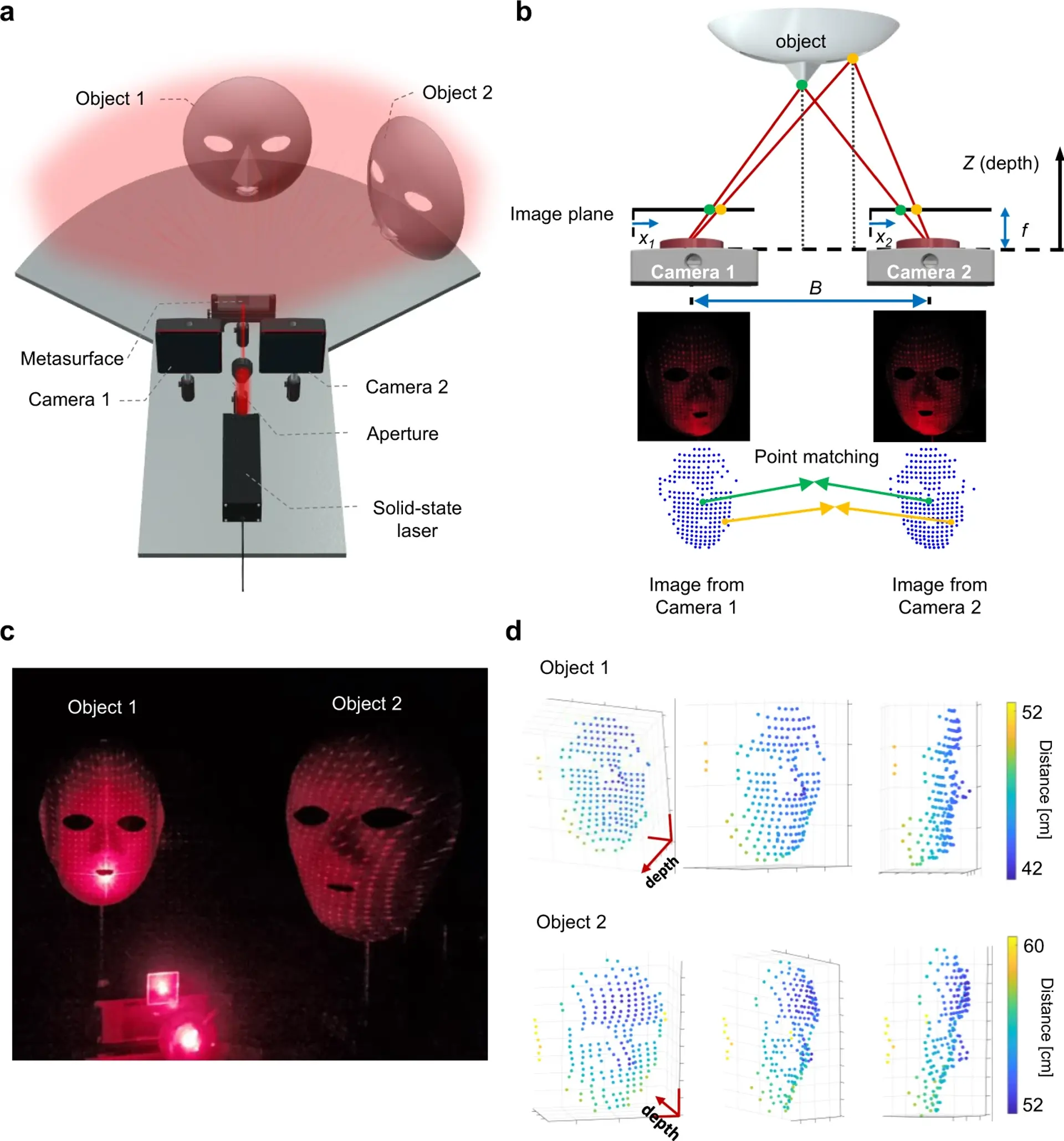
研究人員設計並建造一個裝置,通過一個元表面透鏡發射激光,透鏡上的納米柱被調諧成大約10,000個點,覆蓋一個極端的180度視場。然後該裝置通過一個攝像頭解釋反射或背向散射的光,以提供距離測量。
"我們已經證明,我們可以通過開發一種比傳統的元表面設備更先進的技術來控制所有角度的光線傳播,"發表在《自然通訊》上的一項新研究的共同作者Junsuk Rho教授說。"這將是一項原創技術,能夠實現超小型和全空間的三維成像傳感器平臺。"
光的強度確實隨著衍射角變得更加極端而下降;一個彎曲到10度角的點到達其目標的功率是一個彎曲到接近90度的點的4到7倍。通過他們實驗室設置的設備,研究人員發現他們在60°的最大視角(代表120°的視野)和傳感器與物體之間小於1米(3.3英尺)的距離內得到最佳結果。他們說,更高功率的激光器和更精確調諧的元表面將增加這些傳感器的最佳點位,但在更遠的距離上的高分辨率對於像這樣的超寬鏡頭來說將始終是一個挑戰。
那個微小的元表面的斑點就是你所需要的,把一個激光分割得足夠寬,以映射你面前的一切。
這裡的另一個潛在限制是圖像處理。用於將傳感器數據解碼為三維點雲的"相幹點漂移"算法非常復雜,而且處理時間隨著點數的增加而增加。因此,高分辨率全畫幅捕捉解碼10000個點或更多,將給處理器帶來相當大的負荷,讓這樣一個系統每秒運行30幀以上將是一個巨大的挑戰。
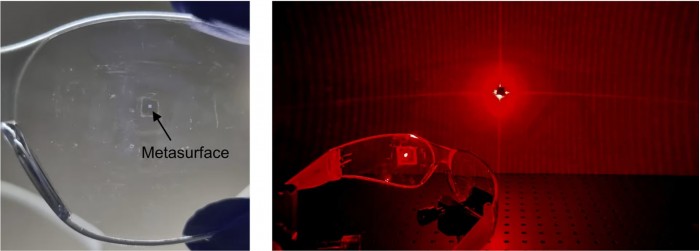
另一方面,這些東西是令人難以置信的微小,而且元表面可以很容易地、廉價地以巨大的規模制造。該團隊在一套安全眼鏡的弧形表面上打印一個。它是如此之小,幾乎無法從一粒灰塵中分辨出來。基於元表面的深度測繪設備可以非常微小,並且很容易集成到一系列物體的設計中,其視場可以調整到一個對應用有意義的角度。
該團隊認為這些設備在移動設備、機器人、自動駕駛汽車和VR/AR眼鏡等方面具有巨大潛力。