特斯拉2022AIDay會議紀要,本次AI日主要展示人形機器人Optimus、自動駕駛研發進程、以及Dojo超算。特斯拉人形機器人亮相首次亮相,並做一個舞蹈動作。之後,該公司展示一些機器人做其他任務的視頻片段,比如撿箱子、澆水等。最後,特斯拉展示將量產的機器人外形,不過功能還不全,隻是進行簡單展示。
【Optimus】
Optimus後續的生產規模可能會達到數百萬臺,並且因為這臺機器人所采用視覺算法、計算芯片、電池均與特斯拉汽車產品線共用,所以它並不是一個完全從零開始的產物,並且可以獲得比其他類人型機器人更好的成本控制。未來售價或低於2萬美元。
最新一代采用2.3kWh容量的電池,並采用集成式的設計,能提高52伏特的電壓。
芯片部分則采用特斯拉的全自動駕駛芯片,但是針對具體的軟件、硬件適配情況進行更改。
針對機器人的不同動作,對軀幹的28個關節進行受力功耗模擬,並設計6款單獨的模擬肌肉的電機,可以在很小的體積以及重量下實現巨大的動力。
手掌設計部分通過六個致動器完成11個角度的自由動作,並能夠舉起超過20磅的物體,使用工具。
通過AI計算,該機器人可以將目標路徑和相關的軌跡結合起來,生成最佳的計劃,並且當外界存在意外的情況時,還能進行動作上的適應,實現在穩定性的基礎上,實現機器人動作的自然性,是特斯拉視覺方案的室內體現。
目前Optimus的研發仍然處於初級階段,還有很多需要優化的點。
【自動駕駛】
2021年,大概有2000用戶使用特斯拉研發的FSD Beta軟件,直至2022年9月,160,000用戶使用該款軟件。
FSD Beta可以實現自動泊車、根據交通燈或交通標志行駛、在與其他車輛交匯處轉彎等功能。
通過收集大量的數據,生成對應的圖像,訓練強大的神經網絡模型
特斯拉的推理系統可以在兩個獨立的計算機上分配單個神經元網絡的執行,這兩個相互獨立的計算機與自動駕駛系統相互連接。
軌跡評分系統包括碰撞預測、舒適度分析、幹預可能性、擬人鑒別器四個方面。
特斯拉的自動駕駛系統利用全方位的3D技術,預測周圍環境占用的可能性,識別車、人等、識別路上隨機移動的物品,以10毫秒的速度運行。
基於圖像處理,車輛可以識別移動物品與非移動物品,預測物品移動方向,並能夠識別路面情況,在下坡路段降低速度行駛。
特斯拉建設三臺超級計算機,擁有14,000片GPU,其中10,000片用於訓練系統及運行,4000片用於自動標簽。
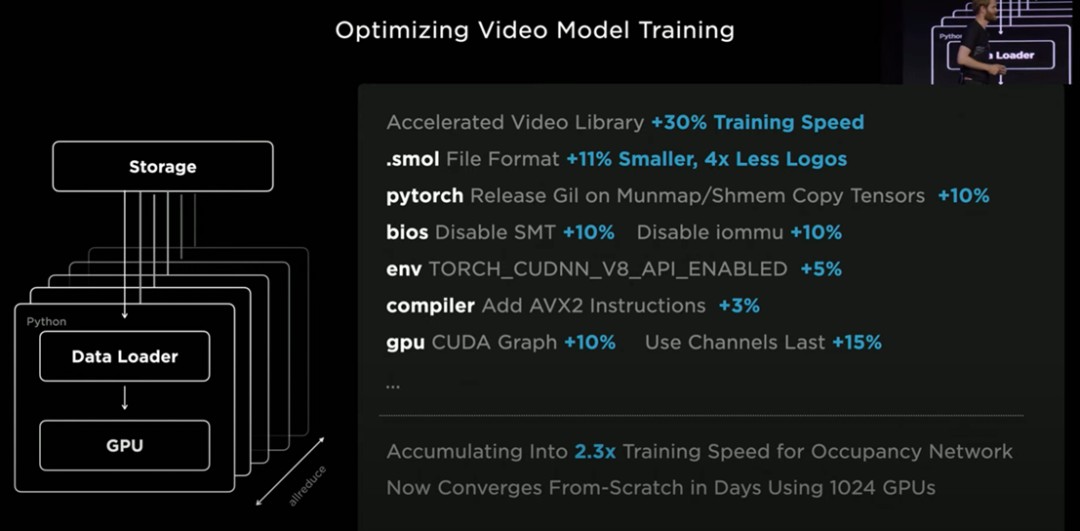
使用優化後的視頻模型訓練,提升30%的訓練速度,IOPS存儲性能提升四倍。
FDS Lanes:目標通過神經網絡系統產生全面的道路集和不同道路的連接點。該神經網絡系統由視覺部分、地圖部分、語言部分。視覺部分通過轉換器將車輛上的8個攝像頭的數據轉換為視覺代表數據,傳入下一個部分。在地圖部分,通過已有的道路導航模型對數據進行處理,對傳入數據進行強化,將傳入得數據拓撲化。在語言部分,用這些復雜的數據集來預測道路情況以及相應的連通情況,並將這些信息編碼為一種專屬於特斯拉的語言。通過這一系統,可以將所有的操作簡單的、完整的編譯到訓練引擎中。
FDS道路神經系統可以在9.6毫秒的延遲內處理達7500萬參數,並能耗保持在8w左右。
FDS神經系統總共能夠同時處理超過10億的參數,超過15w的神經網絡層和超過3750萬的神經節點。總體算力達到100TOPS。為達到這些,需要對每個層面進行優化。
特斯拉的自動標註系統也變得效率更高,采集環境信息、重構可用於訓練的3D模型、再在模型上讓系統完成自動標註、再用少量的人工對於特殊標記進行校正的流程。在目前的特斯拉數據標註體系裡已經跑通,而且效率相比之前有著巨幅提升。
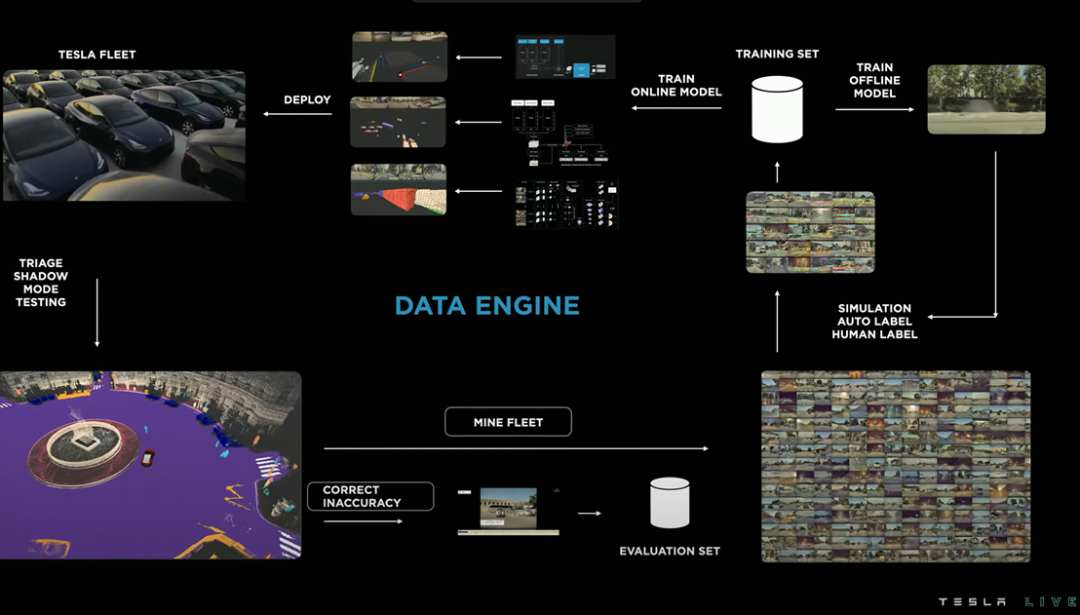
數據引擎是指通過數據來提升神經網絡性能的過程,使用數據引擎功能,車輛行動的準確率得到快速的提升,從去年九月的88%左右提升到目前的99%以上
數據引擎的工作模式:在影子模式下,特斯拉汽車會在行駛過程中不斷收集數據,並將車輛自身決策與駕駛者決策一致的情況定義為正確,否則定義為不準確,將這些數據與定義結果放入評估集中。將評估集中最有意義的數據進行標簽後加入訓練集,通過深度學習來訓練線上及線下的模型,最後將更新的模型再更新到車輛配置中。
FSD Beta 可能在今年底開啟全球推送。
【Dojo】
Dojo的出現主要為兩個目的,其一是比市售雲計算更便宜,其二是比市售雲計算更強大。
Dojo從設計之初就考慮硬件層面要為深度的神經網絡訓練做考慮,所以整個Dojo系統從芯片到機組再到機房的傳輸帶寬都十分可觀,並且特斯拉也將Occupancy網絡應用於Dojo系統之中,實現AI硬件與AI軟件的更佳匹配,最後在降低延遲和性能損失上取得的效果十分驚人。
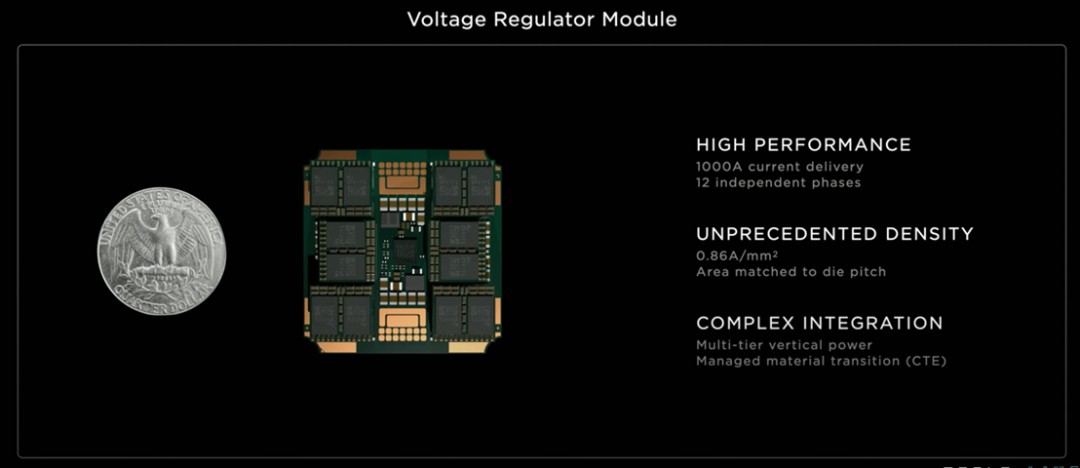
電壓調節模塊可以傳輸1000A電流,具有超高密度,利用多層垂直電源管理材料過渡。
特斯拉未來的目標是減少54%的CTE,提升3倍性能。提高密度是提升系統性能的核心和基石。
System Tray參數:75mm高度、54 PFLOPS(BF16/CFP8)、13.4 TB/S(對分帶寬)、100+ KW Power
Standard Interface Processor參數:32GB(高帶寬動態隨機存取存儲器)、900 TB/S(TTP帶寬)、50 GB/S(以太網帶寬)、32GB/S(第四代PCI帶寬)
High Interface Processor參數:640GB(高帶寬動態隨機存取存儲器)、1TB/S(以太網帶寬)、18 TB/S(Aggregate Bandwidth To Tiles)
【Dojo系統建立目標:解決很難形成規模的約束模型】
單一的加速器到前向和後向通道,再到優化器,再到多個加速器上運行多個副本的流程;線性擴展的;更大激活度的模型想運行前向通道時會遇到適合單個加速器的批量大小往往小於批量規范面的問題;多個加速器上設置同步批量規范模式;通信瓶頸;模型並不是線性擴展的
高密度集成是為加速模型的計算約束和延遲約束部分;Dojo網格的一個片斷可以被分割出來運行模型(隻要分片足夠大);統一的低延遲中的細粒度同步原語加速跨集成邊界的並行性;Tensors是以RAM的形式存儲Chardon,並在各層執行時及時復制;張量復制的另一個數據傳輸與計算重疊,編譯器也可重新計算層。
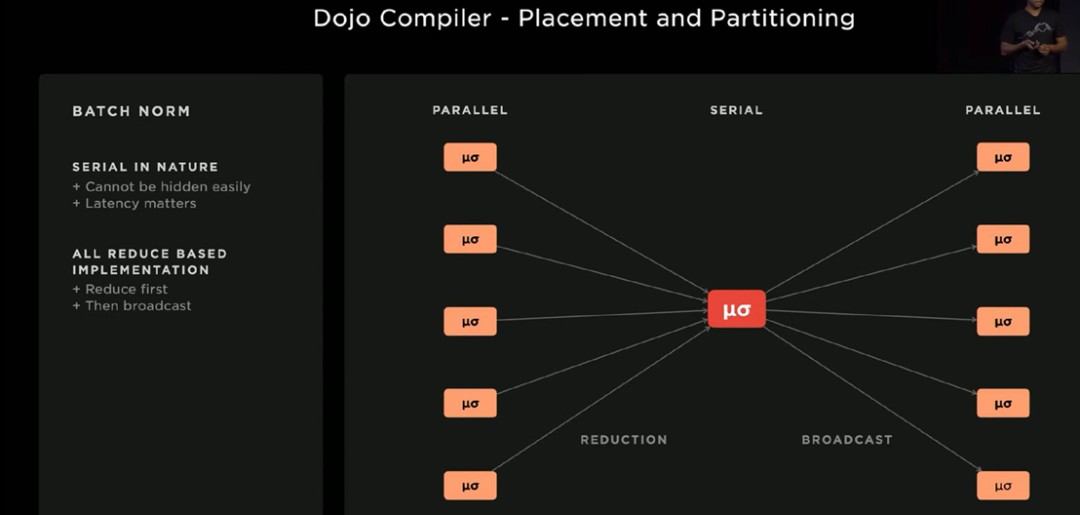
穩定擴散模型:編譯器以模型並行的方式映射;通信階段從節點計算本地平均值和標準偏差開始;協調後繼續並行;期望每個骰子上的350個節點協調是由平均值和標準偏差值
編譯器的操作:從編譯器中提取通信樹;真實硬件的時間節點,中間輻射減少的值由硬件加速;這個操作在25個Dojo編譯器上隻需要5微秒,同樣的操作在24個GPU上需要150微秒。這是對GPU的一個數量級的改進。
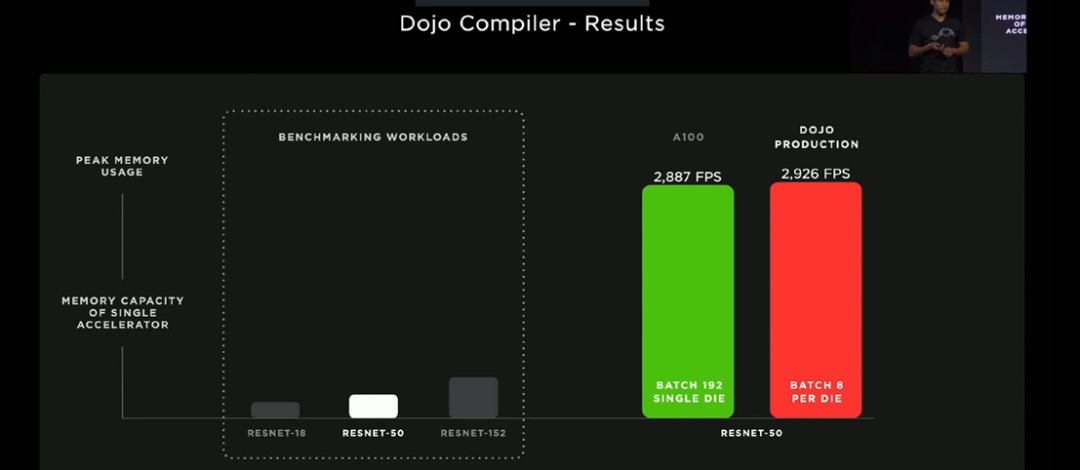
峰值內存使用:Dojo是為解決更大的復雜模型而建立的;當前兩個GPU集群的使用模式,一個是自動標註網絡(用於生成地面真相的離線模型)第二,占有率網絡(高算術強度的大型模型)。
測試結果:多模系統上對GPU和Dojo進行的測量顯示已經可以超越任何100個使用當前硬件運行的老一代PRMS的性能;A100的吞吐量翻一番;關鍵的編譯器優化達到M100的3倍以上的性能。
成果:一個Dojo瓦片取代6個GPU盒子上的ML計算機,而成本比一個GPU盒子還低。一個多月時間來訓練的網絡現在隻需要不到一個星期
問題:計算量過大導致運行在主機上的數據加載器根本無法跟上ML硬件。
擴展傳輸協議;建立Dojo網絡接口卡;添加裝有DINA卡的數據加載主機;通過以太網交換機重新連接網狀結構。優化後占用率從4%上升到97%,實際上期望這個數字很快就能達到100%。
建立高算術強度自動標簽網絡:為單一巨型加速器服務;pytorch層完全達到預期的速度;高性能的密集計算機期望隻用4個Dojo就能提供同樣的吞吐量;計劃在2023年的第一季度建立。
成果展示:6塊芯片密集集成;54 petaflops的計算;640千兆字節的高帶寬內存;集群組件新版本並不斷改進;下一代將實現10倍的改進
【Q&A】
1:為什麼用肌腱的方法驅動機器人,我們都覺得采用肌腱驅動的方式可靠性較低?同時為什麼用彈簧?
A:首先金屬線纜做肌腱,可靠性還是很高的。同時肌腱方案能量消耗較低,我們可以在人手上找到用肌腱和彈簧類似的方案。我們用肌腱收縮,用彈簧舒張。
馬斯克補充:因為我們要快速量產,所以不會等到所有問題都解決後。我們想把機器人部署在工廠,看看機器人有什麼用。當然這是我們的第一版,後面一定會有2.0 、3.0 手部架構會升級。
2:機器人會有人格嗎?會不會後面和我們講笑話 ,成為我們的朋友 ?
A:當然,隻要解決好核心人工智能和關鍵執行器的問題,人們可能會給機器人穿各種衣服,未來會很有趣。
3:想知道人和機器人之間是否會有幹預措施,比如在人類不同意正在發生的事情時就行標記?
A:如果機器人做壞事,我們會在遠程監控機器人。
馬斯克補充:我們希望我們的機器人變得比科幻片裡更像人,隨著AI 發展,我們可以模仿學習更像人類,它能夠執行簡單的指令,甚至可以執行您想要的操作。所以你可以給它一個高級指令,然後它可以把它分解成一系列動作並采取這些動作。
4:之前你說機器人會顯著提升社會經濟產出量級。最開始的時候你說特斯拉的使命是推動世界向可持續能源轉型。對於機器人來說,依然是這個使命嗎?特斯拉會不會把自己的使命改成“推動世界向無限生產力轉型”?
A:機器人的出現當然進一步推動世界向可持續能源轉型。另外我對於機器人幾年以後能做的事情,我很激動;你們肯定也很想找到一個技術幾年以後的發展。對我來說 , 我也很感興趣。
5:機器人後面會具備對話能力嗎?機器人的終極目標是什麼?
A:當然會有對話能力,機器人後面肯定會有一個很有意思的終局,也許最後和電影終結者類似吧。不過我們會很註意機器人的安全性,我們會有一個“停止按鈕”。機器人裡會有一個本地ROM,無法通過網絡升級。這對安全性來說很重要。會很有意思,不會無聊。
6:Dojo項目的目標是什麼?和亞馬遜雲一樣出借算力嗎?我看用7nm ,那麼投入也很大 ?商業化怎麼做?
A:Dojo 是一個大型計算機,和亞馬遜一樣是合理的,這是最高效的。這個世界正在和軟件2.0 轉型(軟件2.0:用神經網絡取代邏輯編程),後面一個軟件會有很多神經網絡。這需要Dojo。
7:機器人會理解我們的情感、藝術嗎?機器人後續如何為我們的創造力服務?
A:如同DallE-2 ,機器人已經可以創造 藝術。未來是很有趣的。
Ashok 補充:機器人可以創造物理藝術,比如跳舞。人工智能畫畫是數字藝術。
8:特斯拉自動駕駛的模型是受到自然語言處理模型的啟發,想知道這方面的歷史,為什麼這樣做,使用語言模型後提升多少 ?
A:兩個方面:第一個是我們之前用密集的網絡訓練道路,之前的模型搞不定稠密的數據。同時道路預測是一個多模型問題,有時候我們無法知道馬路的另一邊是什麼,我們希望模型的預測是連貫的,語言模型可以提供。
9:FSD的神經網絡怎麼做單元測試的?
A:除軟件測試以外還有神經網絡測試,對於一個神經網絡,我們會把之前錯誤的歷史數據都丟給他,看他是否會有更好的表現。同時,我們有影子模式,我們把神經網絡靜謐地推送給用戶,用戶也在協助我們做QA測試。在推給用戶之前我們會做9輪測試,我們的基礎設施保證環節高效。
10:提一個有關基礎模型的問題,我們看到大模型現在都有比較好的表現,比如從GPT-3到PaLM,我們發現大模型都可以做推理。你們覺得是否應該提高數據量和參數個數,這樣的話可以得到一個可以解決所有問題的教師模型“Teacher Model” ,然後剪裁出一個學生模型,作為在大街上的基礎模型?
A:我們的標註系統就是這樣做的。我們雲端標註模型是很大的,我們把一小部分部署在車端。關於基礎模型,我們的數據集有好幾PB, 模型在這樣大的數據集上的表現是很好的。別人說我們用攝像頭無法做感知,但你看我們用大數據做的多好。我們在這樣的模型上做裁剪,最後出來的就是你們看到的。
11:最開始老馬說特斯拉正在做通用人工智能(AGI),想知道公司如何保證安全性 ?
A:我覺得應該會有一個AI 法律機構,比如管理人形機器人、自動駕駛汽車等等。我們覺得應該有個裁判,就像我們在藥物上做的一樣。機器人到時候上街以後,將會通過攝像頭搜集數據,這個數據集會是世界上最大的數據集。到時候公司借助數據集和訓練模型,將會對通用人工智能(AGI)有較大的貢獻。
12:Semi 卡車的感知和乘用車的感知有什麼區別 ?
A: 人類開車就是兩個眼睛+一個大腦,大腦反應還很慢。車用8個攝像頭和高速計算器,肯定能做的更好。
13:機器人能否安裝部署不同的軟件和硬件?
A:我們的神經網絡不支持,下個問題。
14:現在就在美國和加拿大有FSD,推廣到其他國傢的瓶頸是什麼?我還註意到你們想把低速和高速場景融合到同一個神經網絡中,現在的進展?
A:技術上年底就可以推廣,但不同國傢有法規要求。我們在等法規批準。技術上來說,年底就行。我們下個月就會在北美推新版,進步很大。之前Autopilot 和FSD 差別很大,但現在越來越像, 幾個月前,我們在Autopilot 和 FSD上用同一個視覺棧。但在道路檢測上,Autopilot 和FSD還是不一樣的。FSD用更復雜的模型。
另一位同事補充:帶泊車功能的FSD年底就能推出來,到時候停車場到停車場的自動駕駛就能實現。
馬斯卡補充:每英裡幹預次數是很重要的指標,我們正在肉眼可見得提高。
15:問個各人問題,如果老馬你回到20歲,想給20歲的自己說什麼話,提供什麼建議?
A:讓他加入特斯拉,哈哈。多接觸聰明人;多看書;壓力不要太大,珍惜此刻,停下來聞聞路邊玫瑰香也是很好的。我在做獵鷹火箭的時候,試驗場在一個很美的沙灘邊,我們沒有在沙灘邊喝過一次咖啡, 我應該喝一杯才對。
16:馬斯克你現在做機器人的狀態和10年前做自動駕駛的時候一樣,但自動駕駛發展似乎比想象的更難。你有什麼辦法讓機器人和AGI來得更快?
A:AGI發展很快,AI 現在贏所有的基於規則的遊戲,畫畫、寫文章,都能完成。AI 人才也很多,AI的能力是線性增長的。特斯拉有很強的執行器研發能力,和四輪機器人相比,雙足機器人隻要把執行器作對,就能實現。
17:下一個超級工廠隻有機器人嗎?什麼時候我們可以訂購自己的機器人?
A:我們會在工廠裡找一些簡單的工作給機器人,比如裝卸的工作。後面在擴展機器人的能力邊界。至於什麼時候可以買機器人?不知道,3年-5年吧。3-5 年後人們就能收到。
18:機器人軟件會開源嗎?
A:小心人們用機器人幹壞事。有些和安全有關的問題需要處理, 所以概率不大。
19:機器人的帶寬有多大?
A:需要搞清楚你想讓機器人做的事情,轉換成比如 手臂抬多高這樣的問題。之後才能回答帶寬問題。
20:特斯拉那麼偉大,是什麼獨一無二的東西促成的?
A:現在特斯拉很大,各方面專傢也很多 。我們從電動車做到無人電動車。我覺得我的作用是給偉大的工程師提供環境,讓我們發展。有些公司員工的能力是被壓制的。在矽谷就有些公司,員工在公司是沒有發展的。特斯拉不是這樣的公司,員工加入特斯拉以後 所發揮的能力在其他公司是沒有的。
21:公司如何平衡FSD發生碰撞的風險和駕駛表現 ? 你們覺得FSD監管是否應該更加透明?
A:首先特斯拉車的被動安全是所有車裡最強的。另外主動安全,我們公佈 沒有Autopilot的車、有Autopilot的車、有FSD的車的事故率,有FSD的車事故率最低。另外FSD可以避免事故發生,但被救下來的人是不知道自己被救的。所以我們要看總體的事故率。部署FSD 肯定比不部署更安全。
22:為什麼機器人要做到左右平衡?人類有左右撇子,機器人也這樣設計,其中一邊不會更快損壞嗎?另外人類有時候會有一些“神話“的想法,希望自己能有更長的手,可以輕易拿到更遠地方的東西,特斯拉以後會做更像 神話故事裡的機器人嗎?
A:現在我們還是想盡快生產一個有用的機器人,來幫助人類。生產一個有用的機器人,是最難的,我們會衡量一個東西的效用,比如今天幫助幾個人,怎麼幫助的,這回把我們拉回現實。對於一個企業來說,大規模量產一個大傢喜歡的,有用的東西是異常困難的。展望未來,後面如果我們做一個8個手臂的機器人,或者開放一個接口給其他公司用。其他公司基於機器人做插件都有可能。